All Categories
History
This section provides an overview for stepping motors as well as their applications and principles. Also, please take a look at the list of 30 stepping motor manufacturers and their company rankings. Here are the top-ranked stepping motor companies as of July, 2026: 1.ISL Products International., 2.Novanta IMS, 3.TRINAMIC.
Table of Contents
Categories Related to Stepping Motors
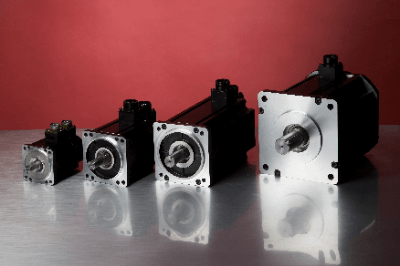
A stepping motor refers to a motor whose rotation angle can be controlled by pulse signals and is a type of motor that can guarantee high positioning accuracy.
Also known as a pulse motor, the rotation angle is determined by the number of pulse signals, which are control signals, and the number of phases of the motor, while the rotation speed depends on the pulse frequency, which corresponds to the speed of the pulses. It features high positioning accuracy and torque with open-loop control, coupled with its relatively inexpensive and simple motor configuration.
Stepping motors are used mainly in applications where positioning accuracy is required, as they are structurally suited for precise and reversible angle control. An example is a drive motor used to express two-dimensional movements of robot devices, such as automatic transfer equipment.
By combining a high-precision ball screw with a stepping motor, the feed rate of a stage can be expressed with extremely high precision and repeatability. Stepping motors can also be used to adjust the opening angle of valves precisely on coating machines that spray a certain amount of paint depending on how the valves are opened, allowing for more elaborate operations.
The inside of a stepping motor consists of a rotor connected to a shaft and several stators installed around the periphery of the rotor. The rotor section is further divided into two parts, each of which is magnetized so that its N and S poles are in opposite phase.
The stator is characterized by the presence of small teeth, which is precisely controlled. 2-phase stepping motors, for example, are magnetized with the same polarity for the stator facing each other and in the opposite direction for the stator next to it. Therefore, the stator attracts and repels the unevenness of the rotor, and the rotor is held in an energetically stable position relative to the stator's magnetization state.
Then, when current is applied to reverse the polarity of the stator, the rotor rotates by one stator. In a 5-phase stepping motor, this is controlled sequentially in 5 steps, thus enabling finer angle control.
The output torque of a stepping motor varies depending on the rotational speed. In general, the torque is high when the rotational speed is slow and low when the rotational speed is high. When selecting a stepping motor, check the motor's rotational speed-torque characteristics chart and select a motor so that the required torque at the rotational speed to be used falls within the pull-out torque curve.
In particular, the pullout torque at high rotational speed is about 20% of the maximum excitation quiescent torque.
Torque characteristics also vary depending on the driver used, internal structure, and input voltage, even for motors of the same external dimensions. Therefore, motor selection should be made in consideration of the manufacturer, driver combination, and input voltage.
A control device called a driver is required to operate a stepping motor. The driver controls the current voltage that is applied to the stepping motor to control the rotation speed, amount of rotation, and other factors.
Drivers are available in constant-current and low-voltage drive systems, but the constant-current system is often used because of its superior torque characteristics at high speeds. Generally, a pulse train is input to the driver from a host control device as an indication of rotation speed and amount, and the motor is rotated at the indicated speed and amount according to the input pulse train.
Some drivers are equipped with a function called micro-step. Stepping motors rotate with the basic step angle as the minimum rotation angle, but drivers with the micro-step function can adjust the current flowing to each coil to subdivide the basic step angle and increase the resolution of rotation electrically.
It also has the effect of reducing vibration and noise, overshoot at each step angle, and shock mitigation at startup and shutdown. The resolution of the micro-step function can be selected by DIP switches, etc., depending on the intended use.
AC servo motors are often quoted in connection with stepping motors.
Suitability of Stepping Motor
AC servo motors have a built-in encoder and feedback control, so the rotational torque is almost constant regardless of the rotation speed. Stepping motors, on the other hand, are not suitable for this application because their rotational torque decreases at high rotational speeds. Conversely, if low-speed rotation is the main use, stepping motor is suitable for this application.
Stepping motors are mainly available on the market in open-loop control type, but there are also products that can be close-controlled by attaching an encoder for improved efficiency. In such cases, however, it will be necessary to review the other advantage of these motors, which is their relatively small size, simple configuration, and low cost.
Applications for Which AC Servo Motors Are More Suitable
Applications that require AC servo motors are those that require advanced rotation control using multiple motors. Since open-loop control cannot be expected to compensate for motor-to-motor motion by sensing, AC servo motors are better suited for this application than stepping motors, as is the case with high-speed rotary motion.
*Including some distributors, etc.
Sort by Features
Sort by Area
ISL Products is a designer, manufacturer and supplier of engineered electromechanical component solutions, founded in 1975 and headquartered in New York. With a focus on meeting specific application requirements, they provide unique solutions at the component level. They specialize in a wide range of components such as dc motors, dc gear motors, electronic ballasts for uvc lamps and audio components. Their comprehensive component solutions are tailored to match the unique needs of diverse industries, including healthcare, medical, commercial, and industrial applications. Alongside their product offerings, they also provide integration assistance, industry leading customer service, and global logistical support.
Novanta IMS was established in 1986 and is based in Marlborough, Connecticut, U.S., and is a manufacturer of motion control components for automation equipment that have applications in various industries. The company provides integrated stepper motor driver controller packages, standalone rotary motors, and linear actuators that have applications in areas including medical instruments, lab automation, electronics assembly, robotics, and, semiconductor manufacturing, as well as packaging, fabrication, and, laser marking sectors. They are certified to ISO 9001:2015 & ISO 14001:2015 and also offer hardware modification, planetary gearboxes, software & firmware, connector options, and chip-level development facilities.
Tolomatic was founded in the 1950s and operates out of Hamel, Minnesota. Tolomatic Is a manufacturer of automation components for industries such as aerospace, agriculture, automotive construction, life sciences, semiconductor, and utilities. Tolomatic has three main product lines which are electric linear actuators, pneumatic linear actuators, and power transmissions. Electric linear actuators include rodless electro-mechanical actuators, electric rod actuators, as well as custom & modified products. Pneumatic linear actuators include rodless pneumatic actuators, rod-style pneumatic linear thrusters, and custom & modified products. Power transmission includes roller screws, industrial caliper brakes, industrial gearboxes, and industrial cone clutches.
SDP/SI was founded in 1950 and is situated in New Hyde Park, New York. SDPP/SI is a manufacturer of precision gears and high-quality mechanical components used in the aerospace, industrial manufacturing, medical technology, and robotics fields. The company manufactures parts in a variety of materials including alloy steel, stainless steel, bronze, brass, nylon, and titanium. The company also provides coating services such as heat treating, zinc plating, and painting. Additional custom options are available including manufacturing to customer drawings and specifications.
Geeplus was founded in 2004 in Beckenham, UK as a management buyout of the electromechanical division inside Densitron Control Systems, Ltd. The company is a worldwide designer and manufacturer of both standard and customized electromagnetic and electromechanical actuators. The company’s primary catalog includes voice coil motors, linear and rotary solenoids, control circuits, and other related components. The company’s custom actuator solutions include design options for custom voice coil actuators, custom solenoid actuators, custom stepper motors, and custom electromagnets.
FKN Systek, Inc., founded in 1997, is manufacturer and supplier of depalletizers and electronic assembly tools to serve the PCB assembly industry with equipment and expertise for separating loaded printed circuit boards with tools such as N100 PCB nibbler used to detach tab routed panels, K6000 in-line multiple Circular Blade Depanelizer for detaching pre-scored boards, the R100 tabletop router and the N200 punch for tab routed panels. The company in Pleasant St, Millis MA, has PCB racks to handle assembled printed circuit cards during the manufacturing process in the telecom, chemical, aviation, and mining industries.
Electric Indicator Company (ELINCO) is an ISO 9001:2015 certified company founded in 1926 in Stamford, Connecticut. Founded in 1969, Japanese Products Corporation (JPC) was acquired by ELINCO in 1991. The company focuses on the design and manufacturing technology of motors, air-moving devices, and drives. Products include brushless DC motors, stepper motors, PMDC motors, AC motors, planetary gearboxes, encoders, fans, and blowers. The main markets of the company are communication, industrial automation, medical technology, office automation, security, home automation, and automotive.
OMEGA Engineering was originally begun in 1962 as a manufacturer of thermocouples and has grown to over 100,000 products for measurement and control of temperature, humidity, pressure, strain force, flow, level pH, and conductivity as well as customer service including data acquisition, electric heating, and custom-engineered products. Additionally, OMEGA offers tools to serve as reference for engineers around the world. OMEGA Engineering serves the aerospace, automotive, wireless, sanitary, test & measurement, process control, power monitoring, environmental, and laboratory markets.
ONExia Inc is based in Exton, Pennsylvania and is a robotics integrator, custom machine builder, and industrial distributor. ONExia specializing in manual process automation and assists manufacturers of all sizes increase throughput with cutting edge technology. ONExia works with customers to develop turnkey custom machines including 2D & 3D vision system integration, software design & development, and machine safety services. ONExia uses robotics to automate line packaging. ONExia also offers robot palletizers that are compatible with new or existing packaging lines.
Sinotech is based in Portland, Oregon with offices in China. Sinotech is a distributor for custom-engineered electrical motors, motor components, and mechanical components manufactured in China. Sinotech’s motors include AC motors, DC motors, brushless DC motors, slotless high speed BLDC motors, stepper motors, cordless motors, gear motors, servo motors, and miniature motors. Motor components include laminations, wound coils, armature and field coils, brushes, and communicators. Mechanical components include assemblies, die castings, investment castings, sand castings, shafts, steamed metal parts, tubular metal parts, machined extrusions, plastic parts, rubber parts, and secondary processing.
JIANGSU LEILI MOTOR CO., LTD., founded in 1993, is a manufacturer of synchronous, micro-stepping, DC brush motors and micro water pumps. Their products are used in research and development, automotive parts, manufacturing, industrial, and sports health industries, with over 200 million machines shipped annually. The company, located in Changzhou City, Jiangsu Province, is affiliated with businesses including Jiangsu DINGS' Intelligent Control Technology Co Ltd, Anhui Leili Intelligent Technology Co Ltd, Vietnam Leili Motor Co., Ltd, and Changzhou Leili Motor Science and Technology Co Ltd.

TRINAMIC, a company founded in 1992 and based in Germany, is a manufacturer and supplier specializing in motors and motion control technologies. The company provides a wide range of products such as integrated circuits, modules, motors, and development tools. Their products are used in various applications such as robotics, automation, 3D printing, and medical devices. The company also offers customer services including comprehensive technical support, documentation, datasheets, and application notes to meet clients’ needs.
Tamagawa Seiki was established in Japan on March 3, 1938, and it is a developer and manufacturer of high-precision control equipments. The company manufactures and develops products like rotary encoders, resolvers, servo motors, gyros, step motors, aerospace products, and space products. Some of their major clients include Mitsubishi Heavy Industries, Toshiba, Hitachi, Toyota, and Honda. Their featured products are the Non-shaking system and Optical level gauging system. This company also manufactures two and three-dimensional (spatial) position/angle sensors.
Nidec Corporation was founded in Kyoto, Japan in 1973 and is a conglomerate with over 200 subsidiaries. Primary products are hard-disk drive motors and automotive parts, and specializes motors ranging from miniature to gigantic. Nidec’s products are used in robotics, automotive, home appliances, agriculturel equipments well as molding, cutting, and machining equipment and sensors.
MOON’s is headquartered in Shanghai, China. MOON’s is a manufacturer or motion control products. Among these products are stepper drives and motors, brushed and brushless DC motors, servo drives and motors, integrated motors, BLDC drives, lighting drivers and control products, and condition monitoring products. MOON’s has achieved ISO 14001 and ISO 9001 certification.
NIDEC ADVANCED MOTOR CORPORATION, established in 1949 and based in Gunma, Japan, is a manufacturer of hybrid stepping motor and fan technology. The company's product range includes AC/DC fans and motors, blowers, stepping motor, synchronous motor and ice maker. It mainly provides customized solutions following its analysis technique in the designing process such as ALD(Analysis Leads Design) which includes vibration, structural and flow analysis. The company has acquired quality management system certification of IATF 16949.
Shinano Kenshi is an ISO 13485:2016 certified manufacturer, producer and seller of hardware and software development products, established in 1918 and is located in Nagano, Japan. The company manufactures a range of products, including drive systems, precision motors, customized motor solutions, motor pumps, and spun silk yarn. Its flagship product is the PLEXTOR, also known as PLEXLOGGER, which includes high-speed cameras, data loggers, and monitors. Additionally, the company is also engaged in developing and manufacturing welfare and life assistance equipment.
SANYO DENKI Europe was established in 1988 in France as the European subsidy of SANYO DENKI CO., LTD of Japan. The company is a manufacturer of components used in mechanization, computing, and public utilities. The company operates in three operating segments: Cooling Systems, Power Systems, and Servo Systems. Cooling Systems develops, manufactures, and sells cooling fans and cooling systems. Power Systems develops and manufactures UPS, engine generators, and solar energy power conditioners. Servo Systems develops, manufactures, and sells servo motors, stepping motors, drive units, and control systems.
Nanotec Electronic GmbH & Co. KG, headquartered in Feldkirchen, Munich, Germany, is a manufacturer of motors and controllers for performance drive solutions since 1991. The products include motors, gearboxes, brakes, encoders, and actuators. Accessories include lubricants, capacitors, spacer sleeves, brake choppers, and connection cables used in semiconductor production, medical engineering, automation systems, the packaging sector, and laboratory automation. The company received the Top 100 award in 2022 for the second time in a row.
Oriental Motor, established in 1885, and headquartered in Tokyo, Japan, is a manufacturer and supplier of motion control and motor solutions. The company offers a range of products, including stepper motors, servo motors, and motorized actuators, catering to industries such as automation, robotics, medical, and semiconductor manufacturing. The company offers UKCA compliant products for the UK market, and holds ISO 9001 and ISO 14001 certifications for their quality management and environmental management systems.
EFKA, founded in 1933 and headquartered in Germany, is a manufacturer and supplier of sewing machine motors and control systems. Their product range encompasses a wide range of sewing machine motors, drive units, and control solutions, tailored for use in industries such as textiles and apparel. The company’s products increase sewing machine performance and enhance higher productivity and quality for global markets. Being an ISO-certified company, EFKA aims at providing creativity, efficiency, and sustainable solutions in the sewing company.
Autonics Corporation, established in 1977 and based in Busan, South Korea, is a developer and manufacturer of automation products, which are marketed worldwide. Some of its products include sensors, peripheral connection equipment, motion devices, control devices, and process automation instruments. The automation products are used in various industries, including automotive, packaging, machine tools, metal, and marine. The company has 12 international offices spanning over 100 countries, a fully automated warehouse system, and various international quality certifications, including RoHS, CE, UL, and EAC. Its safety products meet the functional safety standards IEC 61508 and mechanical safety standards ISO 13849.
Festo Corporation, established in 1925 and headquartered in Esslingen, Germany, is a supplier of automation technology and technical education and is ISO 9001, ISO 13485, and ISO14001 certified. It has around 33,000 catalog products, customized components, and ready-to-install solutions, including grippers, motors, and sensors used in industrial and process automation. The company won the German Future Award in 2010 and serves 300,000 customers worldwide, while its education division provides training solutions for 56,000 industrial companies and educational institutions. It registered €3.81 billion in the 2022 financial year and is available in around 60 countries, with 2,600 patents worldwide.
DFRobot, established in 2008, is a manufacturer of robotics and open-source hardware solutions. Their mission is to empower future inventors by providing easy access to hardware, software, and ideas. With a strong focus on open-source hardware, DFRobot creates user-friendly products and fosters a community of learners. They have expanded their offerings to include STEM education, manufacturing, and more. DFRobot's diverse team consists of employees with varied backgrounds. They offer a wide range of electronic toolkits, modules, and learning resources for DIY hobbyists, industry developers, and educators. DFRobot serves creators globally through their comprehensive online and offline ecosystem.
Hansen Corporation was founded in 1907 in Princeton, Indiana, and is now an ElectroCraft Company. The company specializes in synchron motor and DC motor production as part of ElectroCraft. ElectroCraft provides motion control solutions in industrial, commercial, and consumer product markets. ElectroCraft and Hansen product models include asynchronous drives, stepper motors, DC brush motors and brushless motors, and actuators. The company’s tech center includes a CAD library of Hansen and ElectroCraft products, a conversions calculator, and whitepapers.
Founded in New York in 1916, Kollmorgen designs and manufactures motion system, drives, motors, actuators, gear heads, automated guided vehicle (AVG) systems, and accessories across a number of implementations and industries. These include aerospace, AGV, food&beverage, machine tools, metal forming, medical automation and imaging, energy, packaging, pharmaceutical, postal sorting, printing, robotics, smart warehouses, and tire and rubber production. Kollmorgen assists customers both in custom designs and in allowing customers to design their own devices based on individual needs.
Beckhoff Automation LLC is the American branch of Beckhoff Automation GmbH & Co. founded in Verl, Germany. The United States headquarters is based in Savage, Minnesota. The company serves industries such as automotive, marine, semiconductors, and alternative energy with hardware and software-based solutions. The company’s five hardware product segments are industrial PCs, fieldbus components for I/O, motion drive systems, MX systems, and system-integrated machine vision products. The company also produces software for automation-related tasks.
Techno Drive, founded in 1993 and located in Kanagawa, Japan is a manufacturer of motor drive systems. The company specializes in the production of programmable drivers, motion controls, stepping motors, factory automation systems, auto-focus systems, and automated alignment systems. The company manufactures the drivers with bipolar motors. The motion controllers designed by the company come with 1-axis and 2-axis. The company works and designs its products with micro-stepping technology to develop motor drive systems, and the products are compact, and offer low vibration and precision positioning.
Ranking as of July 2026
Derivation Method| Rank | Company | Click Share |
|---|---|---|
| 1 | ISL Products International. |
16.2%
|
| 2 | Novanta IMS |
7.0%
|
| 3 | TRINAMIC |
6.1%
|
| 4 | Tolomatic, Inc. |
4.9%
|
| 5 | Geeplus Inc. |
4.4%
|
| 6 | Stock Drive Products/Sterling Instrument - SDP/SI |
4.2%
|
| 7 | Festo Corporation. |
4.2%
|
| 8 | Elinco International JPC, Inc. |
3.5%
|
| 9 | NMB Technologies Corporation |
3.4%
|
| 10 | OMEGA Engineering inc. |
3.4%
|
Derivation Method
The ranking is calculated based on the click share within the stepping motor page as of July 2026. Click share is defined as the total number of clicks for all companies during the period divided by the number of clicks for each company.Number of Employees
Newly Established Company
Company with a History
*Including some distributors, etc.
*Including some distributors, etc.
| Country | Number of Companies | Share (%) |
|---|---|---|
|
United States of America
|
10 | 40.0% |
|
Japan
|
6 | 24.0% |
|
Germany
|
5 | 20.0% |
|
China
|
2 | 8.0% |
|
France
|
1 | 4.0% |
|
Taiwan
|
1 | 4.0% |
238 products found
238 products

Sanmei Co., Ltd.
520+ people viewing
Last viewed: 3 minutes ago
Si super is the ultimate stepping servo motor system that is equipped with a 12-bit encoder and our unique positioning algorithm. Features ■Concen...

COMS Co., Ltd.
530+ people viewing
Last viewed: 1 day ago
■Long stroke of up to 2,200mm. It can also handle large and heavy objects. High precision, high rigidity, and high load capacity type using a linea...

Asahi Engineering Co., Ltd.
710+ people viewing
Last viewed: 10 hours ago
Features ■Stepping motor with large hollow diameter ・Achieved a large hollow diameter through unique magnetic circuit design and precision assembl...
4 models listed

Vanguard Systems Co., Ltd.
450+ people viewing
Last viewed: 11 hours ago
■High speed rotation, high torque The newly developed "Smart Algorithm" maximizes the characteristics of the motor, achieving high speed rotation a...

Kanemasa Manufacturing Co., Ltd.
340+ people viewing
An electric actuator is a device that generates thrust using electric power. It is used in all equipment that requires large thrust and performs ti...
6 models listed






COMS Co., Ltd.
530+ people viewing
Last viewed: 1 day ago
■High rigidity even in a small space. It has a load capacity of 8kg and is compact. Achieves space savings compared to conventional stages. The lin...


Sanyu Electronics Industry Co., Ltd.
420+ people viewing
Last viewed: 23 hours ago
A motor that rotates at a fixed angle based on an electrical signal, and is mainly used in paper feeding parts of printers, copy machines, fax mach...
10 models listed

Ally Japan Co., Ltd.
400+ people viewing
Last viewed: 22 hours ago
■Product usage/adoption record Security equipment, medical equipment, small home appliances, etc.

Muscle Co., Ltd.
1070+ people viewing
Last viewed: 5 hours ago
■Challenge to low-cost innovation Integrated AC servo system Cool Muscle 3 is an integrated servo system equipped with drivers, encoders, and other...

Vanguard Systems Co., Ltd.
390+ people viewing
Last viewed: 19 hours ago
■Wiring/space saving ・Stepping motor + encoder + driver + controller integrated type ・Equipped with RS485 serial communication interface - Miniat...
3 models listed

Oriental Motor Co., Ltd.
760+ people viewing
■Summary ・High torque・Low vibration ・Mounting angle 13~90mm ・Geared type, with encoder, and with electromagnetic brake available ■High torque ...

COMS Co., Ltd.
430+ people viewing
■Repeat positioning accuracy ±0.001mm or less A high-precision, space-saving type that uses a U-shaped outer rail structure + 4-row steel ball inte...

COMS Co., Ltd.
480+ people viewing
Last viewed: 3 minutes ago
■Repeat positioning accuracy ±0.002mm or less ・High precision, high rigidity, high load ・The maximum load is 120kg.

Muscle Co., Ltd.
910+ people viewing
Last viewed: 5 hours ago
■Multi-axis control using Modbus RTU (RS485) Cool Muscle 3M is an integrated servo system equipped with drivers, encoders, and other devices necess...

Oriental Motor Co., Ltd.
750+ people viewing
■Summary ・High torque・Low vibration ・Mounting angle 20~85mm ・Geared type and with encoder available ■High precision The 5-phase PKP series has...

COMS Co., Ltd.
490+ people viewing
■Repeat positioning accuracy ±0.0005mm or less High precision type using a guide system with cross rollers and V grooves. High precision, high rigi...

Widework Co., Ltd.
680+ people viewing
Last viewed: 6 minutes ago
■ Characteristics ・ High -speed, high torque, low noise ・ Enhanced motor variations * Both axis products are also available.
2 models listed


Sanyu Electronics Industry Co., Ltd.
510+ people viewing
Last viewed: 1 day ago
There are other model numbers available.
10 models listed

Nisshinbo Micro Devices Inc.
900+ people viewing
Last viewed: 5 hours ago
■Summary NJW4381 is a dual H-bridge driver IC for various actuators that pursues versatility. The control section has a Mode Select function that a...

Widework Co., Ltd.
650+ people viewing
Last viewed: 4 minutes ago
■ Characteristics ・ High -speed and higher functions of output devices that are 1.3 times higher than conventional high -torque products ・ Approx...
3 models listed



COMS Co., Ltd.
560+ people viewing
Last viewed: 1 day ago
■Repeat positioning accuracy ±0.001mm or less High precision, high rigidity, and high load capacity type using a linear slide guide. A precision ba...

Muscle Co., Ltd.
1010+ people viewing
Last viewed: 19 hours ago
■Autonomous distributed servo system equipped with control IC Cool Muscle 3+ is an integrated servo system that is equipped with devices such as dr...

Sanmei Co., Ltd.
450+ people viewing
Last viewed: 4 minutes ago
■No compromises in position, speed, and torque. We have acquired the ability to execute the control elements requested by our customers with the ut...

Nisshinbo Micro Devices Inc.
790+ people viewing
Last viewed: 10 hours ago
■Summary NJW4375 is a small stepping motor driver IC with a built-in pulse generator (PG) for motion control. Based on the reference clock, the int...

COMS Co., Ltd.
580+ people viewing
Last viewed: 16 hours ago
■Maximum speed 250mm/sec Repeatable positioning accuracy ±0.002mm or less This is a high-speed, high-precision stepping motor stage with a maximum ...

Sanyu Electronics Industry Co., Ltd.
570+ people viewing
Last viewed: 10 minutes ago
Among stepping motors, we handle products with particularly small outer diameters of 10 mm or less, which are mainly used for correcting lens aberr...
7 models listed

Nisshinbo Micro Devices Inc.
860+ people viewing
Last viewed: 10 hours ago
■Summary NJU7385 is a dual H-bridge driver IC for small actuators that pursues versatility. The control section has a Mode Select function that all...

COMS Co., Ltd.
570+ people viewing
■Repeat positioning accuracy ±0.0005mm or less U-shaped outer rail + 4-row 4-point contact integrated guide system and precision ball screw are use...

Oriental Motor Co., Ltd.
670+ people viewing
Last viewed: 1 day ago
■Summary ・DC input ・Small driver ・Full closed loop control ・High-precision submicron positioning ■High precision The 5-phase PKP series has a ...