All Categories
History
This section provides an overview for ac motors as well as their applications and principles. Also, please take a look at the list of 94 ac motor manufacturers and their company rankings. Here are the top-ranked ac motor companies as of July, 2026: 1.Stock Drive Products/Sterling Instrument - SDP/SI, 2.Elinco International JPC, Inc., 3.Everson Tesla Inc..
Table of Contents
Categories Related to AC Motors
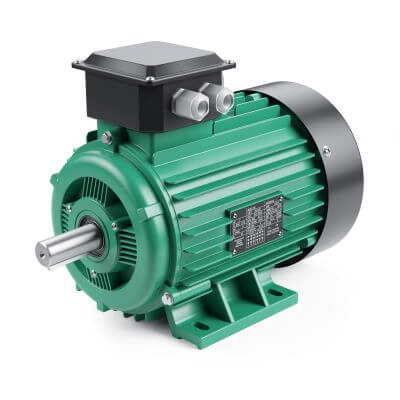
An AC motor is an electric motor that is driven by an AC power source.
AC stands for alternating current, which is a current with a frequency that switches between positive and negative over time. A power supply that outputs such a current is called an alternating current power supply (AC power supply).
AC motors are largely composed of a stator and a rotor.
An electric motor driven by a direct current power source is called a direct current motor or DC motor (English: direct current motor).
AC motors are used to rotate equipment such as pumps in factories, conveyors, rollers, and fans. They are used by connecting the equipment (rollers, etc.) to be rotated, and the shaft of the rotor with a device called a coupling.
Compared to DC motors, which are driven by a DC power source, AC motors are widely used because they are easier to maintain and do not have brushes, which are consumable devices.
In recent years, AC motors have become more widely used because they allow speed control, which was once considered easier with DC motors.
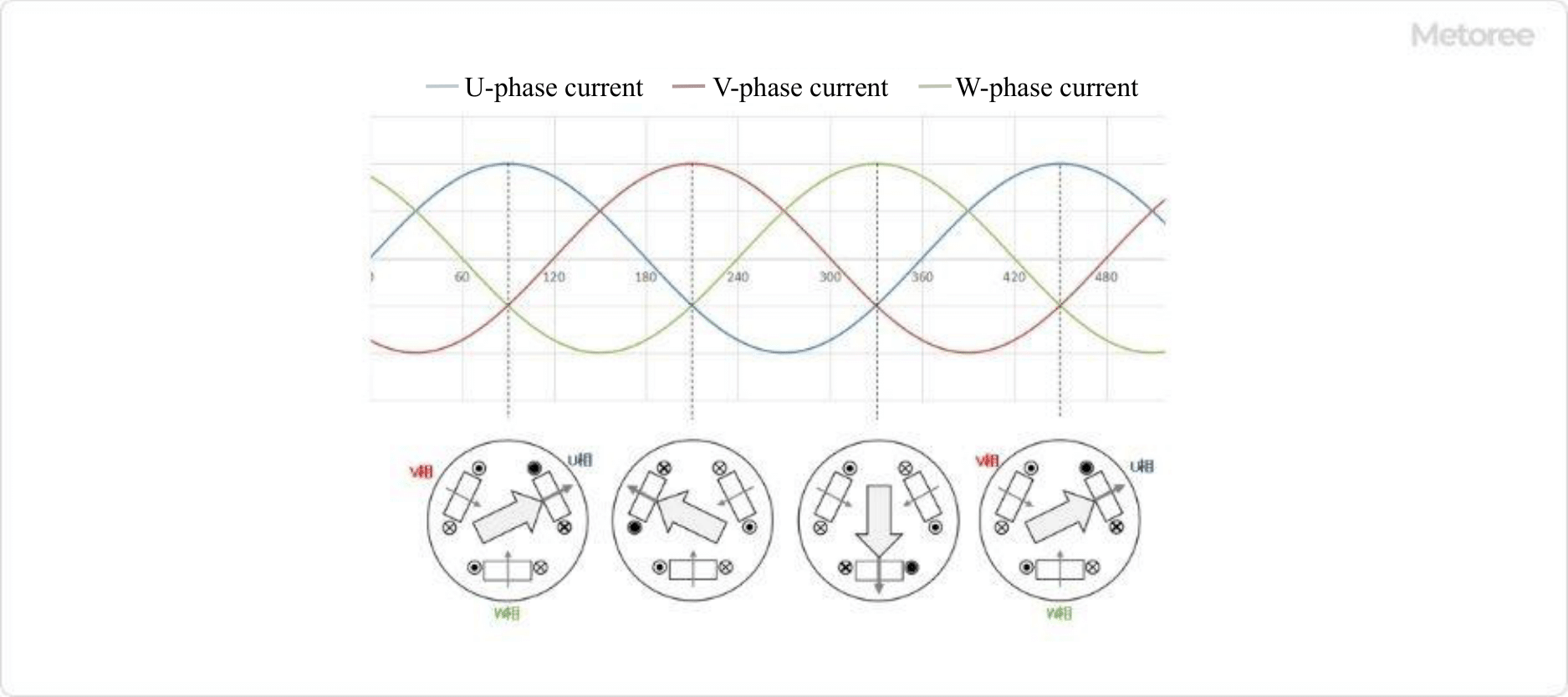
Figure 1. The principle of rotating magnetic field generation
In AC motors, a 3-phase AC power supply, out of phase by 120 degrees, is applied to the stator coil, and the current flowing through the coil causes the electromagnetic steel plate to become an electromagnet, forming a magnetic field in the motor (the right-hand thread's law determines the polarity of the electromagnet. The polarity of the electromagnet is determined by the right-hand screw law.)
Since the AC power supply is shifted in phase with time, the position of the magnetic field rotates with time, and this is called a rotating magnetic field. As the magnetic field rotates, eddy currents are generated in the rotor, and the eddy currents and the magnetic field generate a rotating force that causes the rotor to rotate (Fleming's left-hand rule determines the direction of rotation). This principle of rotation uses the principle of Arago's disk.
The number of stator poles is called the number of poles and is expressed as 2-pole or 4-pole. The speed of the rotating magnetic field Ns is determined by the number of poles p and the frequency f of the power supply p. The speed N of the rotor has a lag, called slip s, relative to the rotating magnetic field, which can be obtained by the formula N = 120f (1 - s) / p. s)/p. The rotational torque of an electric motor is inversely proportional to the speed of the rotating magnetic field and is maximum when the motor starts.
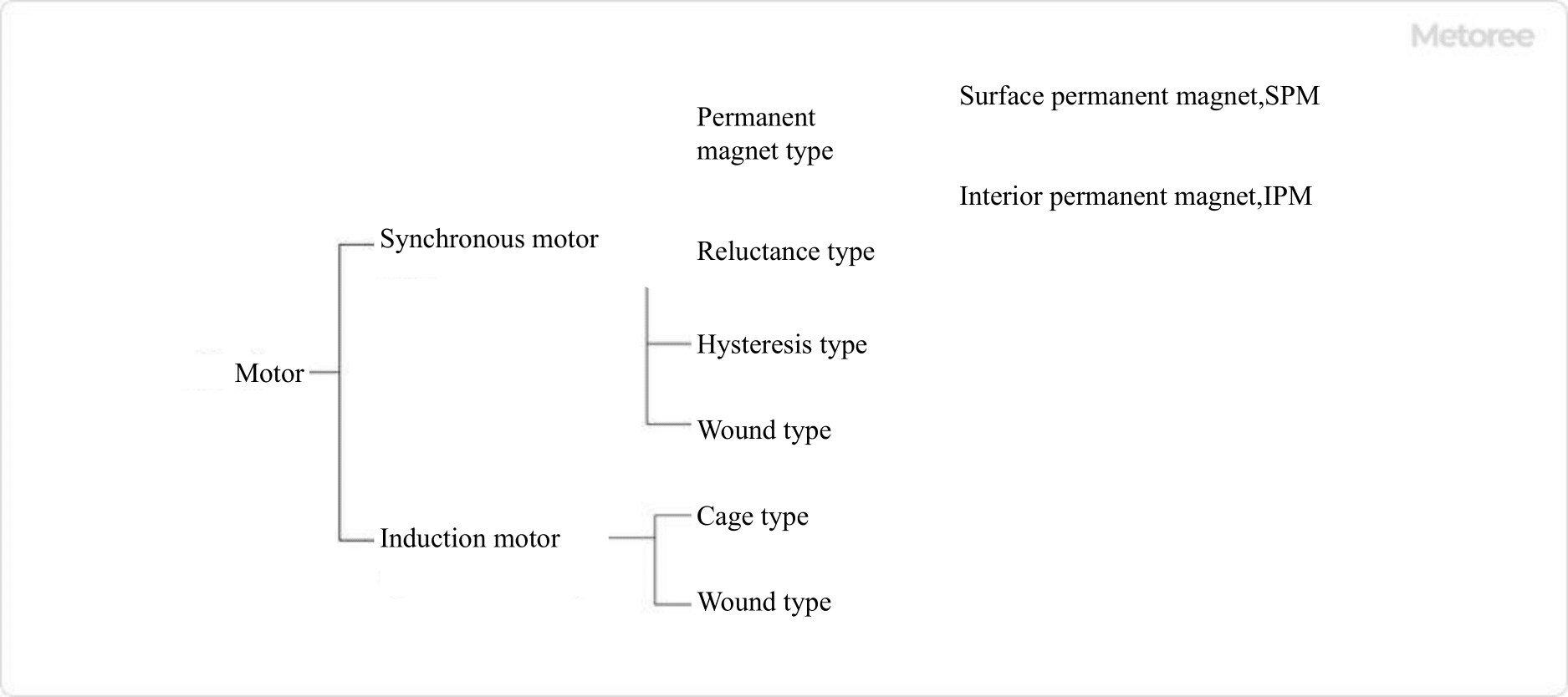
Figure 2. Types of AC motors
AC motors are mainly classified as shown in Figure 2.
They are broadly divided into synchronous motors and induction motors, but can also be classified according to the type of AC power source.
AC motors can also be driven from DC power sources. In this case, an inverter that converts DC to 3-phase AC is used together.
A synchronous motor is a motor in which there is no slippage (synchronization) between the rotating magnetic field and the rotor, and whose rotational speed is determined by the number of poles in the motor and the frequency of the power supply.
Synchronous motors are classified into various types according to the construction of the rotor, but here we will discuss the permanent magnet type, which is relatively commonly used.
Permanent magnet-type synchronous motors have magnets in the rotor core and rotate when the magnetic field of the magnets synchronizes with the rotational magnetic field of the power supply.
Magnets fixed to the surface of the rotor core are called Surface Permanent Magnets (SPM), while those embedded in the rotor core are called Interior Permanent Magnet (IPM).
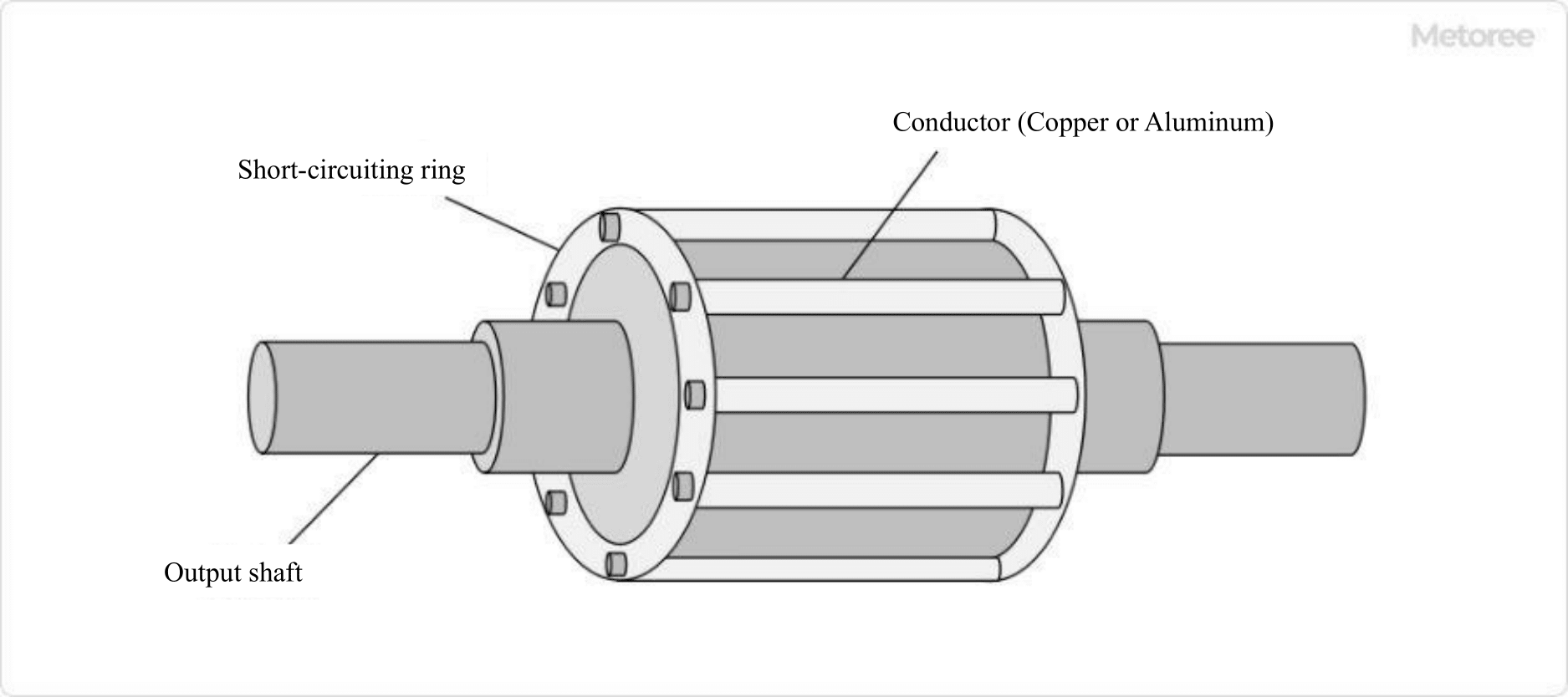
Figure 3. Rotor structure of induction motor
Induction motors are also called induction motors or asynchronous motors.
Induction motors are characterized by a slightly slower rotor speed than synchronous motors (i.e., the rotation speed of the power supply is asynchronous with the rotation speed of the rotor).
Figure 3 shows the rotor structure of an induction motor. As shown in the figure, induction motors are generally composed of aluminum or other conductors in a cage shape.
The rotating magnetic field from the AC power source generates an induced current in the cage-shaped conductor based on the principle of electromagnetic induction, and Fleming's law states that a force is generated by the action of the current and magnetic field. This force causes the AC motors to rotate and move the machine connected to the output shaft.
*Including some distributors, etc.
Sort by Features
Sort by Area

Dunkermotoren, established in 1950 and headquartered in Bonndorf, Germany, is a manufacturer specializing in complete motor solutions. We're more than just motor suppliers – we're your trusted partner for comprehensive drive solutions. We take pride in leading diverse industries such as industrial automation, building automation, laboratory and medical technology, and motive applications. Products include brushed DC motors, brushless DC motors, PMDC motors, AC motor, Venetian Blind Drives, Planetary Gearboxes, Angular Gears , Wheel Hub Gear , Controllers, Brakes, Linear Systems, Encoders.
SDP/SI was founded in 1950 and is situated in New Hyde Park, New York. SDPP/SI is a manufacturer of precision gears and high-quality mechanical components used in the aerospace, industrial manufacturing, medical technology, and robotics fields. The company manufactures parts in a variety of materials including alloy steel, stainless steel, bronze, brass, nylon, and titanium. The company also provides coating services such as heat treating, zinc plating, and painting. Additional custom options are available including manufacturing to customer drawings and specifications.
Yaskawa America, Inc. - Drives & Motion Division, founded in 1967 and located in Waukegan, Illinois, is a manufacturer of AC inverter drives, servo and motion control, and robotic automation systems. They offer a range of products that include industrial AC drives, HVAC drives, machine controllers, gear motors, and articulated robots. Yaskawa's products are used for precise control, automation, and motion capabilities, enhancing efficiency and productivity in diverse manufacturing, industrial, and automation processes. These applications include factory automation, CNC machining, material handling, packaging machinery, and HVAC systems. The company is also ISO 9001:2015 certified.
Bisco Tool Supply was established in 1990 in Florida as a supplier of industrial tools and supplies. The company provides products in wholesale and retail modes, inclusive of drill bits and chucks, taps and dies, stainless steel nuts, bolts and fasteners, safety equipment, lubricants and sprays, and more. It also supplies different types of carbide burrs, abrasives, and reamers that serve the energy and utility, manufacturing, and construction industries, amongst many others.
Regal Rexnord Corporation, established in October 2021 as a combination company of Regal and Rexnord, is a manufacturer and service provider of motors and conversion systems. Its parent companies have over 125 years of industry experience, with its products powering HVAC systems, smart buildings, agricultural and food service equipment, and conveyor systems. As a producer of motors and related components, Regal Rexnord supports various industries such as healthcare, food and beverage, and pharmaceutical production. Their global presence spans over 220 sites, and their product range and services include AC/DC drives, bearings, blowers, conveyor technologies, and predictive maintenance solutions.
Hiwin Technologies Corp. was established in 1989 in Taichung, Taiwan, with subsidiaries across Asia, Europe, and the United States. The company is the first linear motion and motion control product manufacturer in the world to attain ISO-9001 and ISO-14001 certification and serves industries such as medical laboratories, packaging, metal fabrication, and general automation. The company uses CAD technology to design products such as linear guideways, ball screws & supports, torque motors, and industrial robotics machines.
Danfoss was founded in 1933 in Nordborg, Denmark where it remains today. The company serves automotive, food & beverage, energy & natural resources, wastewater, and mobile hydraulics industries as a manufacturer of power systems and industrial hydraulics. The company operates through three business segments: Danfoss Power Solutions, Danfoss Climate Solutions, and Danfoss Drives. Danfoss Power Solutions produces electronic controls, hydraulic power units, and cylinders. Climate Solutions produces heat exchangers, burner components, hydraulic heating, and sight glasses. Drives produce gear motors, low and medium voltage drives, and various software solutions for operating drives.
Wolong Electric Industrial Motors, founded in 1984 and based in Shaoxing, China, is a manufacturer of motor and drive control solutions. The company's product portfolio consists of low, medium and high voltage motors, speed drives, generators and energy storage solutions. It provides motors for home appliances as well as electric vehicles and boats. The products are also utilized in oil & gas, electric power, building, rail, automotive and equipment automation industries. The company has established 39 manufacturing plants spreading across the world in countries like China, Vietnam, Britain, Germany, Poland, Serbia and India along with 3 technology centers.
AMETEK Dynamic Fluid Solutions (DFS), headquartered in Kent, Ohio, USA, is a global manufacturer and supplier of motors, blowers, fans, and pumps established in 1915. With seven manufacturing locations worldwide including in the USA, China, Mexico, Italy, Brazil, Czech Republic, and Serbia, DFS operates under ISO9000 standards. Two facilities of the company have earned the Dr. Lux Quality Award. The company provides air moving products from brands including Lamb, Nautilair, Prestolite Motors, ROTRON, and Windjammer. Their products cater to niche markets and various industries, from business machines to medical equipment, hydraulic fluid power to outdoor power equipment.
Groschopp, established in 1927, and based in Iowa, USA, is a manufacturer and supplier of electric and gear motor parts or systems. The product portfolio includes motor tools, DC & AC motors, BLDC motors, universal motors, gearbox reducers, and motor speed controls. The company also offers modified and customized solutions with motor experts and different motor components. All the company products are ISO-certified. The products are mainly used in machinery and the electric industry.
ABB Motors and Mechanical Inc., founded in 1920 and with headquarters in the USA, is a custom manufacturer and marketer of industrial electric motors, drives, and mechanical power transmission products. The company's products include AC/DC, gear, synchronous, variable speed servo motors, and permanent magnet motors produced in over 20 plants across North America, China, and Mexico for the HVAC, chemical, food and beverage, oil and gas, and wastewater industries, among others. ABB Motors and Mechanical Inc. also holds an ISO 9001:2015 certification.
Electric Indicator Company (ELINCO) is an ISO 9001:2015 certified company founded in 1926 in Stamford, Connecticut. Founded in 1969, Japanese Products Corporation (JPC) was acquired by ELINCO in 1991. The company focuses on the design and manufacturing technology of motors, air-moving devices, and drives. Products include brushless DC motors, stepper motors, PMDC motors, AC motors, planetary gearboxes, encoders, fans, and blowers. The main markets of the company are communication, industrial automation, medical technology, office automation, security, home automation, and automotive.
Everson Tesla Inc., established in Nazareth, Pennsylvania in 1926 is a manufacturer of coils, motors, magnets, superconducting magnets, and superconducting systems. The company's product portfolio includes electromagnetic coils, solenoids, and custom-designed coils, permanent magnets, electromagnets, and rare-earth magnets. Their products find applications in medical imaging, research, and high-energy physics. The company serves markets including Scientific Research and Laboratories, Medical Imaging, Industrial Automation, Aerospace and Defense. The company also offers customized services and technical support.
OMEGA Engineering was originally begun in 1962 as a manufacturer of thermocouples and has grown to over 100,000 products for measurement and control of temperature, humidity, pressure, strain force, flow, level pH, and conductivity as well as customer service including data acquisition, electric heating, and custom-engineered products. Additionally, OMEGA offers tools to serve as reference for engineers around the world. OMEGA Engineering serves the aerospace, automotive, wireless, sanitary, test & measurement, process control, power monitoring, environmental, and laboratory markets.
SMTmax, headquartered in California and established in 2009, is a manufacturer and supplier of SMT tools and equipment for both prototyping and production purposes. Its product offerings encompass pick and place machines, stencil printers, BGA stations, reflow ovens, station parts, and have expanded into the dental clinic and lab fields. The company also provides additional services such as circuit board production, electronic test and measurement instrument manufacturing, customized electronic hardware design, and software development, making them a comprehensive solution for various electronic and manufacturing needs.
Nidec Motor Corporation was founded in 1950 and is a manufacturer and supplier of DC servo motors based in Princeton, Indiana, United States. The company offers various products such as brushless DC, linear actuators, permanent magnet DC stepper, AC synchronous, and AC induction motors. The products have been used in various applications such as vehicle electrification, business machines, medical, factory automation, and projectors. The company has obtained the ISO 9001:2015 certificate, and all of the products are manufactured under RoHS and REACH compliance.
Pelonis Technologies, Inc. was founded in the 1990s in Exton, Pennsylvania. Pelonis technologies is a manufacturer and distributor of air movement technologies and specialty heating products for commercial and industrial use. Pelonis Technologies is ISO 9000 and ISO 14000 certified. Pelonis Technologies has 3 main standard product segments in cooling, heating, and motors & motion control. Cooling products include fans, blowers, micro cooling, and automotive fans & blowers. Heating products include PTC heaters, temperature controllers, and immersion heaters. Motors & motion control include micro, planetary, AC, and medical micro motors. Custom solutions include AC and DC fans and blowers.
Nidec Corporation traces its roots all the way back to 1908. The company has established itself as an international conglomerate that handles virtually everything that spins and moves. Through its over 300 subsidiaries across the globe, the company manufactures motors that run the spectrum from tiny precision motors in cell phones to motors powering heavy commercial and industrial equipment. The company and its subsidiary's power devices and machines are used in many industrial and personal sectors including agriculture, exercise equipment, HVAC, and refrigeration. Products and services include many varieties of motors, drives, and generators.
North American Signal manufactures truck, auto, and industrial warning lights and accessories. Established in 1962 by Julius Newman and partners, NASAG was originally based on North Pulaski Road, Chicago, but is now based in Wheeling, Illinois, with a 45,000-square-foot warehouse. From LEDs, strobe, and battery-powered portable lights to revolving and specialty options, NASAG designs and manufactures warning lights to suit nearly any application. Besides truck and automotive, North American Signal Company also serves industrial markets such as construction and law enforcement.
Koffler Electrical Mechanical Apparatus Repair, Inc. is an electrical refurbishment, repair, and overhaul company in San Leandro, California. The company serves a broad range of industries, including the US Navy, steel companies, oil refineries, and utility companies. They repair and refurbish a variety of equipment, such as generators, circuit breakers, and motors. Additionally, they provide rewinding services and facilities for load testing, laser alignment, and thermographic surveys. The company has 24/7 emergency service available.
Addison Electric originally opened its doors in 1980 and is headquartered in Addison, Illinois. Addison Electric provides systems integration, distribution, and service for industrial tools and equipment. Product lines include motors & gears, drives, controllers, sensors, devices, fuses, blocks, holders, low voltage control products, and thermal management. Service options include electrical and motor services such as PLC programming and clutch and brake repair, as well as dyne load testing and drive and motor dyne testing.
ebm-papst, founded in 1963 and based in Mulfingen, Germany, is a supplier of ventilation and drive technology. Its product range encompasses compact fans, axial fans known for its efficiency and low noise, centrifugal fans available in DC and AC technology, tangential blowers ideal for high air flow in limited spaces, and blowers used in heating systems and household appliances. These products are integral for driving, ventilating, cooling, and air-conditioning various systems. Notably, the company is known for its quality management system that often surpasses international standards and has received accolades like the BdKomm-Award and environmental pioneer awards.
Dietz Electric was founded in 1974 and is based in Milwaukee, Wisconsin. Dietz Electric is a broad-line stocking distributor offering electric motors, drives, and power transmission products. Dietz Electric also offers customization options to test, manufacture, modify, and repair all product offerings. Product offerings include electric motors, hazardous locations motors, custom electric motors, variable frequency drives, motor controls, power transmission solutions, and specialty items such as purge systems, Uras vibrators, disc brakes, transformers, and AC line reactors.
Sinotech is based in Portland, Oregon with offices in China. Sinotech is a distributor for custom-engineered electrical motors, motor components, and mechanical components manufactured in China. Sinotech’s motors include AC motors, DC motors, brushless DC motors, slotless high speed BLDC motors, stepper motors, cordless motors, gear motors, servo motors, and miniature motors. Motor components include laminations, wound coils, armature and field coils, brushes, and communicators. Mechanical components include assemblies, die castings, investment castings, sand castings, shafts, steamed metal parts, tubular metal parts, machined extrusions, plastic parts, rubber parts, and secondary processing.
Citizen Chiba Precision was established in Chiba, Japan in 1979. Citizen is a leader of miniaturized precision motors and customized products which custom-made to meet specific customer requirements for among others, semiconductor manufacturing equipment, medical equipment, and laser application products. Examples of Citizen’s products include optical scanners, linear actuators, servomotors, gear heads, and control drivers.
Shenzhen Power Motor Industrial Co. Ltd, established in 2001, and based in Shenzhen, China, is a manufacturer and supplier of electric power motors. The product portfolio includes a diverse range of brushed and brushless DC motors, universal AC motors, gear motors, brushless blowers, and motor controllers. The products are used in various industries such as smart home improvements, appliances, medical, agriculture, industrial automation, and power tools. All the company products are ISO-certified with quality system certificates.

GMN was founded in 1908 as a manufacturer of high-precision components and systems, in Nuremberg, Germany. Their product list includes Ball Bearings, categorized as special and standard, and ready-to-use bearing systems. The spindles manufactured by the company have applications in grinding, milling, and drilling and the freewheel clutches are available in different forms, such as sprag type and etc. They also develop non-contact seals such as the labyrinth, gap, and face seals and the Electric Drives are also part of the production which has applications in the manufacturing industry along with Aeronautics, Machine Components, and Tool and Die construction.

Orange1 Holding, established in 1971 and based in Piazza della Repubblica, Milan, is a manufacturer specializing in single-phase and three-phase asynchronous electric motors, foundry and turning parts. Its product portfolio encompasses single-phase and three-phase asynchronous electric motors, foundry and turning components, and drives for electric motors. These products have wide-ranging applications in industries like automotive, railways, and industrial sectors. The company's manufacturing capabilities extend to asynchronous motors up to 3700 kW, synchronous motors up to 2700 kW, hydroelectric generators up to 3000 kW, and wind turbines up to 5000 kW.
Drekan Group was established in 2013 and is located in Beautor, Aisne, France is a manufacturer and trader of rotating machines. The company offers a diverse product line including wind turbines, electric motors, and charging stations. It also provides services including workshop maintenance work, maintenance of wind farms, storage of critical machines, and transformer maintenance. These products find applications in renewable energy plants, domestic power supply and distribution, and providing emergency power to hospitals.
Zhengzhou AOKMAN Machinery Co., Ltd, established in 1982 and headquartered in Zhengzhou, China, is a manufacturer of gearboxes, gears, shafts, motors, and spare parts. The company makes products that are equipped with robust precision engineering, optimal durability, and stability and play a vital role in various industries such as manufacturing, construction, metallurgical, agriculture, and transportation, where power transmission and torque control are essential. The gearboxes and components are designed to provide efficient and smooth power transfer, resulting in improved machinery performance and reduced downtime.

NORD is a global manufacturer of drive technology and automation solutions, founded in 1965, and headquartered in Bargteheide, Germany. Their comprehensive range covers gear units for seamless power transmission; motors to drive various machinery; frequency inverters for precise speed control; rugged industrial gearboxes for heavy-duty applications; and drive electronics for seamless integration. NORD drive components are calculated according to DIN 3990, NIEMANN, and AGMA. The certification according to DIN ISO 9001 documents their commitment to quality management.
Neri Motori S.R.L., established in 1946 and headquartered in Bologna, Italy, is a manufacturer of electric motors. The company specializes in the design and production of asynchronous and synchronous electric motors. Some of the products that the company offers include single-phase motors, three-phase motors, brake motors, and more. These products are used in diverse applications, including pumps, fans, compressors, and conveyors. The company bases its operations on rigorous quality standards, adhering to the UNI EN ISO 9001 Quality Management System applied to all production phases and business processes.
Baumüller, founded in 1930 with headquarters in Nuremberg, Germany, is a manufacturer of servo technology, electric automation, and drive systems machinery and equipment. The company's products include decentralized drives, servo motors, high-torque motors, servo pumps, and mobile drives. Baumüller offers customers services that include custom engineering, commissioning, and maintenance of their machines. The company also offers custom planning, engineering, fabrication, and installation of its full automation systems, such as those used in machine manufacturing.
Johnson Electric, since 1959, is a manufacturer of motors, micro-switches, solenoids, microelectronics, and flexible printed circuits based in Shatin, Hong Kong. Their products include AC motors, automotive switches & subsystems, cargo bikes, EMI-shielded flexible circuits, snap action switches, used in automotive, building automation, digital security, food & beverage, and laboratory equipment. Johnson Electric has been in the Hang Seng Corporate Sustainability Benchmark index since 2018. The Hong Council of Social Service awarded it the 5+ caring company award in 2022-2023 and additionally, it is an Institute of Business Ethics supporter.
Siemens began in 1847 and is headquartered in Munich, Germany. Siemens focuses in automation and digitalization technology and operates globally. Siemens’s 5 operating segments are digital industries, smart infrastructure, mobility, Siemens Healthineers, and Siemens Financial Services. Siemens Financial Services provides debt and equity investment as well as financing solutions. Siemens Healthineers is a medical devices company that provides products and consulting. Mobility includes passenger and freight transportation. Smart infrastructure includes full solutions for electrification. Digital industries offer both software and hardware for industries and production efficiency.
CMZ Sistemi Elettronici was founded in 1976 in Italy and it is a manufacturer of systems and solutions for motion control. This company creates, engineers, and produces systems and solutions for industrial motion control. Their products include programmable controllers, servo drives, servo motors, planetary gearboxes, I/O peripherals, and HMI extensions. Additionally, they also produce software and customizable solutions. This company targets OEMs and system integrators for development of automatic machines and equipments. This company has a research laboratory recognized by the Italian Ministry of Scientific Research.
CDC ELETTROMECCANICA is a manufacturer of electromagnetic clutches and brakes. Established in 1960, the company is based in Brignano Gera d’Adda (BG), Italy. The company specializes in designing and producing products such as electromagnetic clutches and brakes for various applications. Its product range includes cam programmers, engines, gearboxes, gear motors and, electronic and electromechanical timers, serving industries such as professional dishwashers, glass washers, ice machines, ovens, refrigeration counters and, incubators for eggs. CDC ELETTROMECCANICA offers services like technical support and customized solutions.
Taishan Jiangkou Electric Appliance Manufactory Ltd., established in 1992 and located in Taishan City, Guangdong Province, is a manufacturer specializing in electric motors. The company provides an array of products, including DC permanent magnet motors, AC universal motors, DC brushless motors, and DC gearbox motors among others. These motors have diverse applications in the automotive parts industry, green energy vehicles, office and home furniture, medical and healthcare equipment, and automatic door openers.
I.M.E. INDUSTRIA MOTORI ELETTRICI S.p.A. was founded in 1972 and is a manufacturer of electric motors based in Manerbio, Brescia, Italy. The company offers range of electrical motors products including wound commutator rotors, EC brushless motors, permanent magnet motors, asynchronous motors, and vacuum motors. The company has obtained the ISO 9001:2015 certification for the IME quality system. 7 products from the line up have been registered for international patents for the innovation and solution to the industries.
Motive Srl, established in 2000 and headquartered in Castenedolo, Italy, is a manufacturer of electric motors, gearboxes, and drive systems. Some of the products that the company offers include asynchronous motors, brake motors, gearboxes, as well as frequency inverters, and servo drives. These products are used in diverse applications, including material handling, packaging, food processing, and automation. The company holds several certifications such as ISO 9001, AEO, ISO 80079, and ISO 7025.
Industria Scientifica Generale Elettromeccanica Vicenza S.p.A., founded in 1948 and based in Quinto Vicentino, is a manufacturer of electric motors. The company offers an extensive product catalog, including cast iron three-phase asynchronous motors, aluminum three-phase asynchronous motors, voltage regulators, rotating frequency converters, three-phase asynchronous marine motors, and motors designed for extreme temperatures. These motors have applications in pasta production, air conditioning systems, fluid circulation equipment pumps, braking system compressors, and cabin ventilation and air conditioning systems.
iD Moteur, established in 2005 and headquartered in Vourles, France, is a manufacturer of motorized sets. The company offers an array of product catalogs, including brushless motors, Br63 speed controllers, electromagnetic brakes with spring-applied actuation at 24 and 205 VDC, A108p motorized drums for dynamic advertising billboards, radial exit gear motors, R110 parallel shaft gears, and axial gear motors, A80i planetary gears with power ratings ranging from 0.010 to 0.12 kW. These products find applications in the automotive and factory automation industries.
Lafert Group, founded in 1962 and based in San Donà di Piave, Venezia, is a manufacturer and designer of electric motors and drives. The company offers a range of products, including brushless servo motors and torque motors, gearless machines for elevators, package drive solutions for automated guided vehicles, synchronous PM motors, and power electronics. These products have applications in packaging and labeling machines, food processing machines, renewable energy systems, cooling compressors, and rubber and plastic processing machines.
SESAME MOTOR CORP., a company founded in 1990 and headquartered in Taichung, Taiwan, is a manufacturer of precision motors and motion control solutions. The company specializes in providing stepper motors, servo motors, and planetary gearboxes for various industries, including robotics, automation, and manufacturing. Their products are known for their efficiency, and precise control, enabling precise motion in a wide range of applications. They also provide customer services, offering technical support, customization options, and communication to meet clients’ needs.
C.R.I. Pumps Private Limited was founded in 1961 and is a manufacturer of irrigation equipment products based in Coimbatore, Tamil Nadu, India. The company manufactures various products such as end suction pumps, pressure boosting system, deep well submersible motors, shallow well submersible pumps, and centrifugal monoblock pumps. The products have been used in various applications such as agriculture, residential, waste water management, building management, and power plant. The company has obtained various certifications such as ISO 9001, ISO 14001, OHSAS 18001, CE, and CSA.
Taizhou Dongchun Motor Co., Ltd., founded in 2010 and located in Zhejiang, China, is a manufacturer of electric motors. The company’s broad range of products includes brake motors, VFD motors, single-phase motors, and three-phase motors. These electric motors find general use across industries and applications, powering an array of machinery, equipment, and systems. The company’s product-specific applications include industrial machinery, agricultural equipment, HVAC systems, automation and robotics, and transportation. The company’s products serve as crucial components for generating motion and power in numerous mechanical and electrical operations in both industrial and consumer contexts.
Lenze is a company established in 1998 by the founder Hans Lenze and it is a developer and manufacturer of integrated automation solutions. This company manufactures products such as IoT, controllers, inverters, geared motors, motors, gearboxes, accessories, and software. Additionally, Lenze provides drive components for machines and installations. The company has served industries including converting and printing, airport logistics, warehouses, textile, and packaging. Furthermore, Lenze is ISO certified. Their support section offers software downloads and a knowledge base for assistance.
Heidrive GmbH, established in 1938 in Schwabach, Germany, is a manufacturer and supplier of quality electric drive systems. The company's main products include motors, gears, and integrated drive solutions used in various industries such as automation, robotics, and medical technology. Heidrive's motors and gears play a vital role in delivering precise and efficient motion control to a wide range of applications. With its resilience to efficiency and reliability, Heidrive aims to meet the unique needs of its customers and provide them with tailor-made solutions for their specific requirements.

SEW-EURODRIVE, founded in 1931 and headquartered in Germany, is a manufacturer and supplier of drive automation solutions. The company offers an extensive product portfolio including gearmotors, frequency inverters, servo drives, industrial gears, and motors, catering to various industries like automotive, food and beverage, mining, and more. SEW-EURODRIVE's drive solutions are utilized in many applications, such as conveyor systems, lifting equipment, agitators, and mixers, contributing to increased efficiency and productivity. The company aims to provide unique and quality solutions that meet the evolving needs of its customers, empowering industries with cutting-edge drive technology.
Oriental Motor, established in 1885, and headquartered in Tokyo, Japan, is a manufacturer and supplier of motion control and motor solutions. The company offers a range of products, including stepper motors, servo motors, and motorized actuators, catering to industries such as automation, robotics, medical, and semiconductor manufacturing. The company offers UKCA compliant products for the UK market, and holds ISO 9001 and ISO 14001 certifications for their quality management and environmental management systems.
Panasonic Industry Europe is the European branch of Panasonic, a global manufacturer of electronics and houseware, originally founded in 1918. Panasonic Industry Europe manufactures in 4 categories: components, devices, energy & building, and automation devices & solutions. Components include relays, capacitors, resistors, sensors, switches, connectors, couplers. Devices include wireless connectivity, e-bike systems, motors, compressors, thermal solutions, GPS antennas, as well as electronic materials. Energy & building includes batteries, fuel cells, solar sells, power tools, and home IoT. Automation devices & solutions include sensors for factory automation, industrial motors, laser welding, and more.
Anaheim Automation, Inc. is a manufacturer and service provider specializing in motion control products established in 1966 in Anaheim, California, USA. The company produces a wide range of motion control products, including linear guides for moving machine tables along an X or Y axis, integrated circuits, and gear motors. It also offers customization services to clients requiring additional support, including wiring, redesign, and private labeling. The company's products are primarily used in the robotics, food processing, and medical diagnostics sectors.
Parvalux Electric Motors Ltd., founded in 1947, is a UK-based electric and geared motor manufacturer in Bournemouth, currently a subsidiary of an American company, Maxon Precision Motors, Inc. The company supplies industrial and building automation as well as material handling products to original equipment manufacturers (OEMs). These products include building access control systems, robotic solutions, and automated guided vehicles (AGVs). It also develops mobility solutions like wheelchair ramps and lifts, along with medical devices like air pumps and ventilators. The company further offers products for transportation, logistics, and agriculture, including marine steering systems as well as livestock feed and ventilation systems.
NTN Bearings began in 1918 in Kuwana, Mie, Japan, and is now headquartered in Osaka. The company is a manufacturer of bearings, velocity joints, and precision equipment, as well as a maintenance and service provider. The company serves the aerospace, automotive, construction, wind energy, and infrastructure industries. The company operates via BCA Bearings, Bower Heavy Duty Bearings, and NTN SNR brand of velocity joints, linear modules, distribution rollers, and suspension parts. Other components the company manufactures include linear motion, flanged discs, and condition monitoring equipment.
Jiangsu Weiteli Motor Limited By Share Ltd., established in 1976 and based in Taizhou, China, is a manufacturer of motors, including servo, drive, and stainless-steel motors. The company holds ISO 9001, ISO 14001, and TS16949 certifications and exports its products to various regions, including the US, Southeast Asia, and Western Europe. Jiangsu Weiteli’s IEC standard stainless-steel motors are fully enclosed, three-phase squirrel cage synchronous motors with electrical performance and installation dimensions that comply with IEC-60034 standards. The company’s NEMA high-efficiency motors, which hold CC0082A and EEV2234888 efficiency certifications, are fully enclosed, self-fan-cooled, three-phase asynchronous motors ranging from 1 to 300 horsepower.
VEM GmbH was established in 1997 and is a manufacturer of drive solutions, custom drives, and single components based in Dresden, Germany. The company manufactures various products such as IEC standard motors, permanent-magnet synchronous motors, frequency converter, compact drives, and slip ring induction motors. The products have been used in various industries such as rolling mills, power plant technology, water management, renewable energy, and transport technology. The company has obtained the certification of ISO 9001, ISO 14001, ISO 50001, ATEX-Directive 2014/34/EU, and DIN EN 15085-2.
Camozzi Automation SpA is headquartered in Brescia, Italy, and was established in 1964, is a manufacturer specializing in components, systems, and technologies for the industrial automation field. The company offers a broad product range, including electromechanical cylinders, direct and indirect-acting 2/2 - 3/2-way solenoid valves, and pressure switches and vacuum switches among others. It also extends services like software installation, training, and repair and maintenance to its products. These products have applications in industrial automation, life sciences, and cyber-physical systems.
Rozum Robotics, founded in 2015, is a manufacturer of advanced robotic systems and components based in Minsk, Belarus. The company's offerings include various robotic products, including robotic arms, robot controllers, linear actuators, and custom solutions. One of the standout features of the company's robotic arms is its precision. These arms are engineered to perform tasks accurately, ideal in applications requiring precise movements, such as assembly, quality control, and material handling. The company has also ventured into the field of collaborative robots. These robots are designed to work safely alongside humans and are particularly valuable in medical environments and research labs.
Oriental Motor USA Corp., established in 1978 and based in Torrance, California, is a manufacturer of motors and control systems and is ISO 9001 and ISO 14001 certified. The company stocks over 50,000 products that it sells worldwide, including actuators, motors, and controller products used in several industries like the medical, semiconductor, and factory automation industries. In 1983, the company developed brushless DC fans, and it later developed watertight, dust-resistant motors in 1990. In 1991, it came up with motorized linear slides and motorized cylinders.
WEG S.A. is an ISO 9001-certified manufacturer of industrial engineering products founded in 1961 and based in Jaraguá do Sul, Brazil. The company produces equipment and products for power generation, control, and coating metal or wood. These include powder coatings for decorative or protective purposes, gas turbines, and dry-type transformers. The company primarily serves clients in the oil and gas, wastewater processing, and mining industries. It also offers maintenance, engineering, and automation services to its customers.
Founded in New York in 1916, Kollmorgen designs and manufactures motion system, drives, motors, actuators, gear heads, automated guided vehicle (AVG) systems, and accessories across a number of implementations and industries. These include aerospace, AGV, food&beverage, machine tools, metal forming, medical automation and imaging, energy, packaging, pharmaceutical, postal sorting, printing, robotics, smart warehouses, and tire and rubber production. Kollmorgen assists customers both in custom designs and in allowing customers to design their own devices based on individual needs.
B&R Industrial Automation GmbH, founded in 1979 with headquarters in Austria, is a manufacturer of automation technology, including a complete portfolio of robotics, automation, and software. The company's standard and tailored products are used in the automotive, maritime, medical device assembly, packaging, and plastics markets, among many others. The product line includes industrial PCs, I/O systems, robotics, and software for industrial components. B&R joined the ABB Group in 2017 to specialize in the integration of technology and sophisticated engineering to provide industries with solutions for machine and factory automation, motion control, and integrated safety technology.

Mavilor Motors S.A., established in 1979 and headquartered in Barcelona, Spain, is a manufacturer and supplier specializing in the production of servomotors. The company's product portfolio includes AC servo motors, DC servo motors, brakes, tachogenerators, and power generators. These products are utilized in various sectors, including electronics, renewable energy, medical devices, aerospace and defense, and entertainment and amusement. The company holds both ISO 9001:2015 and ISO 14001:2015 certificates and has global distributors in France, Germany, the United States, Mexico, and other countries.
Nuova ASAV is an Italian manufacturer and supplier of dental equipment and related accessories that was established in Cavriago, Reggio Emilia, in 1985. The company specializes in manufacturing standard as well as customized products for dental laboratories and clinics. These products include sandblasters for surface treatment applications, furnaces with programmable or touch-screen controls, and micro-motors for milling, drilling, or polishing operations. The company’s products are commonly used in Italy’s dental schools, clinics, and laboratories.
Elom Motor Group Co.,Ltd, established in 2012 and based in Haian, China, is a manufacturer and supplier specializing in high voltage motors and generators. The company’s range of products includes squirrel cage motors, slip ring motors, and marine generators. These products find application in various industries, including power generation, chemical and petrochemical processing, and construction. The company offers services including technical support, customization, and installation and commissioning. It exports its products to more than 40 countries, including the United States, the Netherlands, and Italy.
MENZEL Elektromotoren GmbH was founded in 1927 and is a manufacturer and supplier of custom electric drive products based in Berlin, Germany. The company manufactures various products such as asynchronous squirrel cage motors, asynchronous slip ring motors, and rotating converter sets. Various application scenarios and case studies have been done by the company, such as underground mine in Australia, coal mine conveyor belts, and oil refinery. The company has obtained the certification of DIN EN ISO 9001 for the quality management system, and has obtained recognition for BV Mode II Scheme.
Jeumont Electric was founded in 1898 and is headquartered in Jeumont, France is a manufacturer and supplier specializing in high-power electric machines and auxiliary equipment. The company offers an extensive product catalog, including permanent magnet generators, asynchronous machines, and low-voltage converters among others. Additionally, it also extends services like machine asbestos removal, inductive power transmission, and renovation and reconstruction. These products find applications in electric motors, renewable energy, and automotive industries.
Electric Motor Center, Inc. is a distributor of electric drives and motors established in 1978 and based in Arkansas, USA. The company primarily stocks products from global manufacturers such as WEG, Baldor, and Worldwide Electric. These products include AC motors and controls, DC motors and controls, and gear products for utilizing AC or DC power. It also offers motion controls and servos for controlling the position, velocity, or torque of motors. The company mainly markets to its clients in the power generation, public utilities, and metalworking sectors.
Rockwell Automation, Inc. was founded in 1903 and is headquartered in Milwakee, WI. Rockwell Automation provides industrial automation and digital transformation solutions around the world. Rockwell Automation operates through their intelligent devices, software & control, and lifecycle services segments with both hardware and software products and services. The Intelligent Devices segment offers drives, motion, safety, sensing, industrial components, and configured-to-order products. The Software & Control segment provides control and visualization software and hardware, information software, and network and security infrastructure solutions. The Lifecycle Services segment provides consulting, professional services and solutions, and connected and maintenance services through independent distributors.
GuangZhou XiangYuan Electronics Co., Ltd. is a supplier of industrial electronic components. The company specializes in DC-DC converters and power conversion modules for industrial automation and control systems. Its products are widely used in machinery, automation equipment, and industrial control applications. XiangYuan provides standardized products and technical support for OEMs, system integrators, and industrial users worldwide.
Demag Cranes & Components Corp., founded in 1968 and based in Wetter, Germany, specializes in producing industrial cranes, hoists, and crane components. Its product lineup includes a range of offerings such as crane kits, enclosed rail crane systems, enclosed rail monorail systems, rope hoists, and chain hoists. The company's offerings cater to diverse industrial needs, providing efficient solutions for material handling, lifting, and transport, thereby enhancing operational productivity and safety across various sectors.
GW ELECTRIC SHANGHAI CO., LTD. was established in 1952 and is a manfacturer of motor products based in Fengxian, Shanghai, China. The company manufactures various products suchas IEC standard motors, NEMA standard motors, DC planetary gear, AC worm gear, and hydraulic motors. The products have been used in various industries such as woodworking machinery, photovoltaic tracking system, medical equipment, washdown duty, and packaging machinery. The company has participated in various exhibitions such as 2019 EASA, 2018 IAMD USA, 2018 Hannover Messe, and 2019 SPS IPC Drives.
Yaskawa America Inc., started in 1967 and based in Waukegan, Illinois, is a manufacturer of machine controllers, industrial robots, and variable frequency drives and is part of Yaskawa Electric Corporation. Some of its products include industrial AC drives, machine controllers, and IEC programmable robots. The company incorporates the Kaizen method of continuous incremental improvements and Total Quality Management processes to prevent manufacturing defects, and its distributors must be certified and re-certified every two years. It is ISO 9001 certified and is the only industrial drives and motion control manufacturer to win the Deming Medal.
CG Power & Industrial Solutions Ltd., established in 1937 and headquartered in Mumbai, India, is a supplier that designs and markets products related to power generation, transmission, and rail transportation. The company offers a range of products and services, including MV switchgear, VCB, PCVCB, GIS, and RMU. It also provides rail transportation equipment like traction motors, converters, cubicles, relays, and point machines. It offers turnkey solutions for transmission and distribution (T&D) through sub-station projects, engineering, procurement, and construction (EPC). The company has achieved ISO 9001 and ISO 18001 certification. It serves industries such as utilities, power generation, and rail transportation.
Item Industrietechnik GmbH, founded in Germany in 1976, is a supplier of construction solutions and building kit systems for machinery, fixtures, and plants. The company's item product portfolio comprises more than 4,000 high-quality components designed for use in machine bases, work benches, automation solutions, and lean production applications. It has 10 subsidiaries and support centers throughout Germany and also has wholly owned subsidiaries in the USA, China, Italy, Poland, and Switzerland.
FactoryMation, LLC is a distributor of control products for the industrial sector that was established in 2006 in Canton, Georgia, USA. The company offers digital panel meters for tracking parameters such as voltage or frequency, AC drives for controlling the torque or speed of electric motors, and emergency disconnects for isolating electrical equipment or circuits from a power source. It also offers programmable controllers, pushbuttons, and relays for semi- or fully automated facility layouts. The company’s products are commonly used in the industrial manufacturing sector, including by clients in the automotive and food and beverage markets.
AutomationDirect.com was founded in 1994 to provide solutions for the industrial automation market and has been growing its list of offerings ever since. AutomationDirects’ extensive catalog includes individual components such as cables, various controls, I/O devices, relays, gauges, fittings, and sensors to complete systems. Many parts and devices, especially PLC units are customizable. AutomationDirect.com also provides support via video instructions, online manuals, a learning library, an active community forum to further assist customers.
Ranking as of July 2026
Derivation Method| Rank | Company | Click Share |
|---|---|---|
| 1 | Stock Drive Products/Sterling Instrument - SDP/SI |
2.7%
|
| 2 | Elinco International JPC, Inc. |
2.7%
|
| 3 | Everson Tesla Inc. |
2.3%
|
| 4 | Yaskawa America, Inc. - Drives & Motion Division |
2.1%
|
| 5 | OMEGA Engineering inc. |
1.9%
|
| 6 | Danfoss Industrial Automation |
1.8%
|
| 7 | Groschopp |
1.8%
|
| 8 | Pelonis Technologies, Inc. |
1.8%
|
| 9 | B&R |
1.6%
|
| 10 | SEW-EURODRIVE GmbH & Co KG |
1.6%
|
Derivation Method
The ranking is calculated based on the click share within the ac motor page as of July 2026. Click share is defined as the total number of clicks for all companies during the period divided by the number of clicks for each company.Number of Employees
Newly Established Company
Company with a History
*Including some distributors, etc.
*Including some distributors, etc.
| Country | Number of Companies | Share (%) |
|---|---|---|
|
United States of America
|
23 | 32.4% |
|
Italy
|
11 | 15.5% |
|
Germany
|
10 | 14.1% |
|
China
|
9 | 12.7% |
|
Japan
|
3 | 4.2% |
|
France
|
3 | 4.2% |
|
India
|
3 | 4.2% |
|
Switzerland
|
2 | 2.8% |
| United States | 1 | 1.4% |
|
Singapore
|
1 | 1.4% |
|
Hong Kong
|
1 | 1.4% |
|
Taiwan
|
1 | 1.4% |
|
Belgium
|
1 | 1.4% |
|
Spain
|
1 | 1.4% |
|
United Kingdom
|
1 | 1.4% |
168 products found
168 products

Tatsuta Co., Ltd.
790+ people viewing
Last viewed: 1 day ago
■Features ・There are capacitor run type single-phase motors and three-phase induction motors. Although the starting torque of a capacitor run type...

Murai Equipment Co., Ltd.
650+ people viewing
Last viewed: 6 hours ago
■About single phase motor ・Special products...A wide range of types including various starting methods, thermal protectors, anti-vibration types, ...

Nerve Motor Co., Ltd.
440+ people viewing
Last viewed: 1 day ago

Oriental Motor Co., Ltd.
750+ people viewing
Last viewed: 1 day ago
■Summary - Capable of vertical drive and load retention when stopped ・Equipped with non-excitation type electromagnetic brake ・Three-phase high-e...

Sowa Electric Manufacturing Co., Ltd.
780+ people viewing
Last viewed: 5 hours ago
■Features The rotation direction can be unidirectional or bidirectional.
2 models listed

Oriental Motor Co., Ltd.
700+ people viewing
Last viewed: 4 hours ago
■Summary ・Multi-functional model with external analog settings ・Equipped with functions such as load factor display, 4-speed operation, and alarm...

Tatsuta Co., Ltd.
800+ people viewing
Last viewed: 1 day ago
■Features ・There are capacitor run type single-phase motors and three-phase induction motors. Although the starting torque of a capacitor run type...

Sowa Electric Manufacturing Co., Ltd.
970+ people viewing
Last viewed: 10 hours ago
■Features ・Rotation direction can be unidirectional or bidirectional. ・A rotation speed detection circuit can be installed. - Types of stator sta...
7 models listed

Murai Equipment Co., Ltd.
720+ people viewing
Last viewed: 9 hours ago
■About three-phase motor ・Special products...Suitable for a wide variety of requests (explosion-proof motors can be manufactured) ・MET product......

Nerve Motor Co., Ltd.
600+ people viewing
Last viewed: 1 day ago
■Summary - Reduction gears and intermediate reduction gears can be purchased separately. ・When displayed in red, the reducer rotates in the same d...

Sanki Co., Ltd.
950+ people viewing
Last viewed: 12 hours ago
Features ■Adoption of non-asbestos lining The lining material is a non-asbestos material with excellent wear resistance and a large amount of braki...

Nerve Motor Co., Ltd.
450+ people viewing
Last viewed: 18 hours ago

Ichinomiya Electric Co., Ltd.
1130+ people viewing
Last viewed: 1 day ago
Standard motor based on JEM and JIS standards. The use of a steel plate frame allows for compact yet powerful operation. Main features ■Small and ...

Murai Equipment Co., Ltd.
720+ people viewing
Last viewed: 5 hours ago
■About single phase motor ・Special products...A wide range of types including various starting methods, thermal protectors, anti-vibration types, ...

Tatsuta Co., Ltd.
950+ people viewing
Last viewed: 1 day ago
■Features ・There are capacitor run type single-phase motors and three-phase induction motors. Although the starting torque of a capacitor run type...

Nerve Motor Co., Ltd.
690+ people viewing
Last viewed: 1 day ago
■Summary - Reduction gears and intermediate reduction gears can be purchased separately. ・When displayed in red, the reducer rotates in the same d...

Sowa Electric Manufacturing Co., Ltd.
730+ people viewing
Last viewed: 1 day ago
■Features ・The rotation direction is specified in one direction. ・A rotation speed detection circuit can be installed. - Types of stator stack th...
3 models listed

Murai Equipment Co., Ltd.
630+ people viewing
Last viewed: 21 hours ago
■About three-phase motor ・Special products...Suitable for a wide variety of requests (explosion-proof motors can be manufactured) ・MET product......

Oriental Motor Co., Ltd.
630+ people viewing
Last viewed: 7 hours ago
■Summary ・Equipped with a digital display panel and setting dial for easy operation of Kuru Kuru Pon ・Easy wiring just connect the motor and driv...

Tatsuta Co., Ltd.
870+ people viewing
Last viewed: 21 hours ago
■Features ・There are capacitor run type single-phase motors and three-phase induction motors. Although the starting torque of a capacitor run type...

Murai Equipment Co., Ltd.
730+ people viewing
Last viewed: 11 hours ago
■About single phase motor ・Special products...A wide range of types including various starting methods, thermal protectors, anti-vibration types, ...

Tatsuta Co., Ltd.
820+ people viewing
Last viewed: 1 day ago
■Features ・There are capacitor run type single-phase motors and three-phase induction motors. Although the starting torque of a capacitor run type...

Murai Equipment Co., Ltd.
740+ people viewing
Last viewed: 6 hours ago
■About single phase motor ・Special products...A wide range of types including various starting methods, thermal protectors, anti-vibration types, ...

Oriental Motor Co., Ltd.
790+ people viewing
Last viewed: 1 day ago
■Summary ・Easy setting of rotation speed with volume ・One-touch connection between motor and control unit ・Output 6~90W ・Speed control range ...

Oriental Motor Co., Ltd.
850+ people viewing
Last viewed: 1 day ago
■Summary ・Ideal for applications that operate continuously in one direction ・Three-phase high-efficiency motor for inverter control is also avail...

Japan INSDAC Co., Ltd.
650+ people viewing
Last viewed: 5 hours ago

Tatsuta Co., Ltd.
1000+ people viewing
Last viewed: 14 hours ago
■Features ・There are capacitor run type single-phase motors and three-phase induction motors. Although the starting torque of a capacitor run type...

Oriental Motor Co., Ltd.
1010+ people viewing
Last viewed: 23 hours ago
■Summary ・Built-in simple brake ・You can instantly switch the rotation direction even while driving. ・Output 1~90W ■Ideal for applications wher...

Nerve Motor Co., Ltd.
590+ people viewing
Last viewed: 9 hours ago
■Summary - Reduction gears and intermediate reduction gears can be purchased separately. ・When displayed in red, the reducer rotates in the same d...

Sanki Co., Ltd.
1070+ people viewing
Last viewed: 7 hours ago
Features ■Compatible with top runner standards This is a brake motor that uses Toshiba Premium Gold Motor. Clears the top runner standards. (Exclud...