All Categories
History
This section provides an overview for laser scanners as well as their applications and principles. Also, please take a look at the list of 32 laser scanner manufacturers and their company rankings. Here are the top-ranked laser scanner companies as of July, 2026: 1.Z+F USA, Inc, 2.FARO Technologies, Inc, 3.Novanta Photonics.
Table of Contents
Categories Related to Laser Scanners
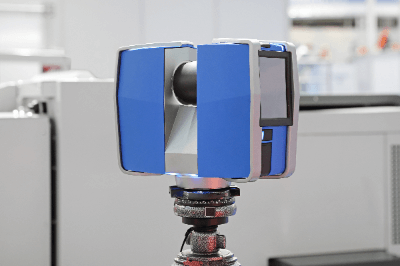 A laser scanner is a measurement device that acquires positional information of an object in three dimensions. A laser beam emitted from the scanner is directed at the object, and the reflected light is used to measure positional information, such as distance and angle.
A laser scanner is a measurement device that acquires positional information of an object in three dimensions. A laser beam emitted from the scanner is directed at the object, and the reflected light is used to measure positional information, such as distance and angle.
Non-contact, non-prismatic measurement is possible, so measurements can be taken safely. It can also acquire a large amount of 3D information as point cloud data.
There are four main types of laser scanners:
The main applications are surveying in facility design, plant maintenance, construction sites, etc. They are also useful for documenting existing conditions and creating CAD models.
Other uses include measuring topography, surveying displacement in tunnels and existing structures for civil engineering and maintenance and repair, and accurately recording accident and crime scenes in criminal investigations.
Furthermore, they are also used to measure surface profiles projected in 3D projection mapping and can be used in a variety of other situations.
Laser scanners measure positional information by irradiating a laser beam onto an object and detecting the reflected light. Position information can be measured without directly touching the object.
There are two main measurement methods.
A laser beam is irradiated onto an object, and the time it takes for the reflected laser beam to return and the laser irradiation angle are measured. The distance is calculated from the measurement time, and the coordinate position is calculated using the measurement angle and XYZ coordinates.
This enables the acquisition of 3D coordinate data, as well as a great deal of information for each point, such as RGB color coordinates, reflection intensity, reflection rate, and even angle information.
The time-of-flight method requires a longer measurement time to obtain more information, but it can provide highly accurate measurements.
Multiple modulated laser beams are irradiated onto an object, and the distance to the object is determined by measuring the phase difference between the reflected light from the object and the emitted light.
Compared to the time-of-flight method, the phase-shift method is more prone to noise in the measurement and has a shorter measurement distance. However, the measurement time is much shorter.
The time-of-flight method is suitable for high-precision measurement, and the phase-shift method is suitable for measurement time.
The data acquired by the laser scanners are read by dedicated software.
Coordinate data is expressed as dots on the screen, and based on this information, the measured local conditions are reproduced on the PC. The data within the detection range is comprehensively acquired, so the situation can be reproduced.
Modern automobiles are equipped with ADAS (advanced driver assistance systems), which supports safe driving.
In the last few years, advances in automated driving technology have led to the addition of a new sensor based on laser scanners called LIDAR (light detection and ranging).
LIDAR is a sensor that can detect objects at a close range with higher accuracy than conventional radar. LIDAR is used in automated driving because it is necessary to measure the distance to an object with higher precision.
However, laser scanners cannot replace millimeter-wave radar and other sensors. Each has its advantages and disadvantages, and they are used in a complementary manner.
Laser scanners are excellent at detecting objects at short distances with high accuracy, but their detection performance is easily affected by bad weather conditions such as rain and fog.
Millimeter wave radar is less susceptible to weather conditions and has a better detection performance for objects at long distances than laser scanners. However, the detection performance of millimeter-wave radar is inferior to that of laser scanners for objects at close range, and for objects with poor radio wave reflectivity.
*Including some distributors, etc.
Sort by Features
Sort by Area
Novanta Photonics, founded in 1947 with headquarters in the UK, is a manufacturer of the key components of laser-based diagnostic, analytical, micromachining, and fine material processing equipment. The company's products include laser beam steering components, multi-axis scan heads, C02 lasers, solid-state lasers, and ultrafast lasers. Novanta Photonics’ products are used by medical and industrial OEMs and system architects to enable and improve laser-based processing equipment. Some examples include glass processing, laser marking, micromachining, metrology combs, and optical tweezers.
AEROTECH creates solutions for motion and positioning of devices. Customers are from industries as diverse as data storage, medical devices, and aerospace. AEROTECH develops controllers, drives, motors, and other parts for motion and positioning devices and offers custom-engineered motion systems. AEROTECH’s serves both manufacturers of individual parts as well as equipment operators offering full range of support rom design to manufacturing to deployment.
Electrolift, Inc. is a custom manufacturer of hoisting products and solutions that was established in 1932 in Clifton, New Jersey, USA, as a member of the Hoist Manufacturers Institute. The company specializes in producing hoisting equipment built to customer specifications. These include single or twin hook hoists, base mounted hoists, and individual hoist components or parts. It also offers hoist commissioning, installation, and site personnel training or support. The company’s products are mainly used in construction, port, and logistics operations.
Banner Engineering Corporation, established in 1966 and headquartered in Minneapolis, Minnesota, is a manufacturer and supplier of industrial automation products. They offer an extensive range of sensors, including proximity sensors, photoelectric sensors, and limit switches, for detecting object presence, position, and speed. Additionally, Banner provides a different types of switches, such as pushbuttons, toggle switches, and rotary switches, to control electricity flow and offer system feedback. Their wide array of controls includes PLCs, HMIs, and motion controllers, enabling automation of industrial processes.
Pepperl+Fuchs, Inc. was founded in Mannheim, Germany in 1945 developing the forerunner of the proximity switch. Pepperl+Fuchs continues to develop proximity sensors as well as other industrial sensors including ultrasonic sensors, rotary encoders, positioning systems, display and signal processing, vibration monitoring, industrial communication, and signal processing as well as related accessories and software. Explosive protection products include safety barriers, surge protection, wireless solutions, HMI systems, power supplies, electrical explosion protection equipment, level measurement, and related software.
Clairex Semiconductor, established in 2017, and located in Plano, Texas, is a manufacturer that specializes in design and produces optoelectronic components. The company offers a range of products related to optoelectronics, including IREDs, LEDs, photodiodes, and phototransistors. It also offers both custom-designed and standard optoelectronic components. Its products emit radiation from the junction at wavelengths dependent on the bandgap energy of the dopants used in the processing. Its products are suitable for use in commercial, medical, and military.
Z+F USA, Inc. is a manufacturer of coordinate measuring machines (CMMs). It is headquartered in Bridgeville, Pennsylvania, USA since 1975. The company designs, manufactures, and supplies many types of 3D Laser Scanners and 2D Profiling Systems. Its 3D Laser Scanners products include Z+F IMAGER 5016, Z+F IMAGER 5010, Z+F IMAGER 5010X and Z+F IMAGER 5010C. Its 2D Profiling Systems include PROFILER 9020, PROFILER 9012 and PROFILER 9012A. Its products serves the aerospace, automotive, industrial controls, marine and medical device manufacturing industries. The company also offers services including rentals, calibrations, technical support, installation, and training
Trimble, a company founded in 1978 and headquartered in Sunnyvale, California, is an industrial technology manufacturer that provides solutions to enable professionals to improve their work processes. The company offers a wide range of products and services, including guidance and steering, agronomic solutions, displays, and more. It also offers satellite navigation systems, hardware, and software. Its software enables surveyors to transform field data from GNSS receivers, total stations, laser scanners, mobile mapping systems, and more. It has achieved ISO 9001, ISO 14001, and OHSAS 18001 certification. It maintains a business in the US, Sweden, Germany, Finland, and more.
FARO Technologies, Inc, founded in Lake Mary, FL in 1981 is a manufacturer of 3D measurement, imaging and realization technology. The company's product portfolio includes Portable Measurement Arms, Laser Trackers, 3D Laser Scanners, Portable Metrology Solutions, and CAM2 Software. the company serves markets including Automotive and Electric Vehicles, Renewable Energy and Energy Storage and Electronics and IT Infrastructure. The company has 25 offices in Europe, Asia, Australia and the USA.
Vitrek Corp, established in 1990 and based in Poway, California, USA, is a manufacturer and supplier of high voltage test and measurement equipment. The company's product range includes Non-Contact Measurement devices, MTI Instruments Accumeasure Capacitance Products, Portable Hand-Held Signal Simulators/Calibrators, and Semiconductor/Solar Metrology Systems. These products are designed for various testing and measurement tasks. They mainly serve the electronic, appliance, medical, aerospace, and semiconductor industries. The company's services include safety and electrical test equipment provisioning, solar and metrology system offerings, vibration/engine balancing system solutions, and high-speed data acquisition.
Datum Tech Solutions is a manufacturer and supplier of BIM technologies offering 3D laser scanning equipment including total stations, laser scanners, survey equipment and scan & go laser scanning accessories as well as 3D scanning software sales established in 2012 and headquartered in Boise, Idaho. The company also offers rental services and has a field team providing expert insight and training in 3D laser scanning, and BIM and construction software such as total station & GPS/GNSS software, laser scanner software, and software & firmware updates.
Bentley Systems, Incorporated is a global provider of software and digital engineering solutions for the design, construction, and operation of infrastructure. The company was founded in 1984 and is headquartered in Exton, Pennsylvania, USA. Its products are used by a wide range of AECO industries, including civil engineering, architecture, construction, manufacturing, and utilities. The company's software solutions help engineers, architects, and other professionals to design, build, and operate infrastructure more efficiently and effectively. Bentley Systems offers a number of services including technology and consulting services, as well as training services including MicroStation training, ProjectWise training, and OpenRoads training.
CAPTURE 3D is based in Santa Ana, California, and is a 3D measurement products supplier and distributor that was established in 1997 as a subsidiary of Germany’s GOM GmbH. The company’s products include automated 3D scanning systems outfitted on a robotic arm, industrial 3D scanners for mapping complex models, and a standardized optical 3D measuring machine for precision handling and mapping of large parts or products. It also offers GOM-branded control, data management, and analysis software for portfolio products. The company chiefly serves clients in the transportation, industrial automation, defense, and R&D sectors.
Founded in Rocklin, CA, Galil is a leading supplier of motion controllers for customers across numerous industries from semiconductors to machinery, to automotive, to the arts. Galil also creates programmable logic controllers (PLC) and specialized multi-axis motion controllers. Galil makes both standard designs as well as custom designs for individual customer needs.

El.En. S.p.A, a company founded in 1981 and based in Florence, Italy, is a manufacturer and supplier specializing in technological laser solutions. The company's product portfolio includes CO2 lasers, laser scanning heads, and G-Series galvanometers. These products find applications in various industries, including food processing, packaging, and the printing and labeling sector. The company offers services including technical support, spare parts supply, and customization options for specific customer requirements, all while being ISO 9001 certified.

RIEGL Laser Measurement Systems GmbH, started in 1978 and headquartered in Horn, Austria, is an ISO 9001-certified manufacturer of laser rangefinders, distance meters, and scanners. Its product portfolio includes terrestrial laser scanners, distance meters, and airborne laser scanners. The devices have applications in city modeling, flood zone mapping, and road surface measurements, among other fields. The company also provides companion software for its laser scanners, and its airborne laser scanners have fully integrated airborne mapping systems with corresponding cameras and GNSS systems. The company’s headquarters has over 74,000 square feet of workspace used for research, development, and production.
Moduloc is a manufacturer of industrial control system components established in 1987 and based in Hertfordshire, England. The company produces various optical sensors, laser detectors, and laser measuring systems primarily used in the metals industry. These include distance measuring lasers, hot metal detectors (HMDs) for harsh environments, and IP66 waterproof long-range inductive proximity sensors. Aside from its products, the company offers installation, calibration, and repair services. Its products are mainly used by clients in the metal processing sector, with additional applications in construction, mining, and aerospace manufacturing.
Scantech SAS was established in 1992 in La Motte-Servolex, France, and is a manufacturer of measuring and control systems helpful in textile and non-woven applications. It deals in laser, x-ray, microwave online measurement, visual inspection tools, and infrared. It also manufactures sensors used in the fuel cell applications, an end-to-end solution for gigafactories, and a scanner for blown film lines. The company provides an ergonomic user interface, automatic calibration, and laser triangulation. The products benefit energy, metal, extrusion, lamination, and converting industries.

Hexagon AB was established in 1992 in Stockholm, Sweden as a manufacturer, designer, and marketer of digital reality solutions and autonomous technologies. The company offers various products, such as, digital quality inspection, Jovix, LuciadCPillar, REcreate, among others. The solutions offered by the company enhance productivity, efficiency, quality, and safety in various sectors, including manufacturing, infrastructure, industrial, public sector, and mobility applications. It also offers geographic information system (GIS) software for creating 3D models and maps, as well as sensors for satellite location and data collection from the air and ground.
AMETEK Scientific Instruments is based in Oak Ridge, Tennessee, USA, and is an ISO 9001-certified manufacturer of precision analysis instrumentation established in 2006 as a division of AMETEK, Inc. The company produces professional electrochemical, corrosion, and material analysis instruments. These include photoelectrochemical test systems used in solar cell research, frequency response analyzers, and energy storage testing products. The company’s products are mainly used by clients in the research, power generation, and petrochemical sectors.
Nikon Metrology Inc. is a manufacturer of advanced optical and precision technology. It is headquartered in Brighton, Michigan, and was established in 1917. The company manufactures a range of measuring instruments, including X-ray/CT inspection equipment, laser radar, 3D laser scanners, Image measurement systems and Optical measuring machines. Some of its popular products are the CrystaView 5 CMM software, the Nexo T2 laser tracker, and the MM-600 optical comparator. Nikon Metrology Inc. also provides after sale service, technical support and training services. Its products are used in various industries, including automotive, aerospace, and medical.
Zoller + Fröhlich GmbH, founded in 1963 and headquartered in Wangen im Allgäu, Germany, is a manufacturer of industrial machinery. The company's product range includes ferrules for solderless connections, tools and machines for many different applications. It also offers control panels for plants in the automotive and processing industry, cable processing machines and laser measurement technology. The company has a worldwide distribution network with dealers in more than 40 countries. It also offers software products and Tooling-List which gives an overview of which wire end ferrules can be processed with which machines.
Micro-Epsilon was originally founded in Osaka and Micro-Epsilon America was founded in 1998, headquartered in Raleigh, North Carolina. Micro-Epsilon develops, manufactures, and distributes sensors to aerospace, battery production, glass production, wind power, precision optics, medical technology, transportation, semiconductor, and other industries. Micro-Epsilon’s sensor product categories include inductive, capacitive, laser, confocal, laser distance, magneto-inductive, draw-wire, rotation speed, color, paint thickness measurement, and fiber optic sensors in addition to interferometers and other sensor equipment.
Centerline Design is based in Finkenwerder, Hamburg, and is a contract manufacturer specializing in metal parts and assemblies that was established in 2003 as a subsidiary of the Centerline Group. The company offers a range of design and production capabilities, including engineering services such as FEM analysis, CAD/CAM, prototyping, and testing. It also offers laser cutting, welding, machining, and surface treatment manufacturing services, as well as logistics services for clients requiring additional support. The company is certified to ISO 9001:2015 and ISO 14001:2015 standards, and chiefly serves clients in the automotive, aerospace, and energy industries.
GeoSLAM, founded in 2012 and acquired by FARO Technologies, Inc. in 2022, is a British manufacturer based in Ruddington, Nottingham, specializing in handheld laser scanners utilizing LiDAR and SLAM (Simultaneous Localization and Mapping) technology. The company produces various 3D geospatial technology products for mapping spaces, including handheld devices for scanning indoor, outdoor, or underground environments, and software platforms for creating georeferenced point clouds automatically. It also offers software tools for creating floor plans using point cloud data. The company's products are mainly used in surveying and mapping operations, as well as in civil engineering and construction, forestry, and the mining sector.
Leica Geosystems AG, founded in 1921 and based in Heerbrugg, Switzerland, is a manufacturer of systems and products in surveying and geographical measurement. The company is part of Hexagon. Its products include laser scanners, machine control systems, lasers, levels, and mobile mapping systems used in several fields, including mining, monitoring, agriculture, natural resources, and transportation. It is ISO 9001 and ISO 14001 certified, and in 1985, it launched the first GPS receiver, WILD WM101, for surveying applications. It acquired civilian businesses from Magnavox and introduced the first in-house GPS product in 1994.

FIESSLER Elektronik, founded in 1956 in Bretten, Germany, is a manufacturer and supplier of safety and control systems. The company offers a range of safety switches, sensors, and control devices used in industrial automation, ensuring operational safety and efficiency. FIESSLER's products find applications in various industries including automotive, packaging, and material handling, where they enhance the safe and seamless operation of machines and equipment. Courtesy of its user-friendly and optoelectronic safety solutions of great quality, the company is always at customers’ disposal for word and deed. The company is also ISO 9001 Certified, an assurance of the customer's constant quality of products.
RIFTEK LLC, a company established in 1993, based in Minsk, Belarus, is a manufacturer and supplier of optoelectronic instruments for measuring geometrical quantities. The company provides various products such as laser triangulation sensors, 2D and 3D laser scanners, absolute linear encoders, optical micrometers, and specialized systems for measuring dimensions, displacements, thickness, and diameter. These products are used for various applications such as power generation, distribution, industrial automation, railway transport, machine vision, and others. The company also offers engineering, installation, testing, and maintenance services for its customers.
Topcon Corporation is a manufacturer and distributor of optical, sensor, and control products that was established in Tokyo, Japan, in 1932. The company’s products include ophthalmic instruments such as tonometers, refractometers and slit lamps. It also offers positioning sensors and control products, such as global navigation satellite system (GNSS) receivers, laser scanners, and total stations. The company operates internationally, with subsidiaries in the Americas, Europe, and the Middle East. It chiefly serves clients in the engineering, aerospace, and agriculture sectors.
Software Cradle Co., Ltd., founded in Beavercreek, Ohio, in 1984 is a provider of computational fluid dynamics (CFD) simulation software. The company's product portfolio includes Thermo-fluid analysis simulation tool used for analyzing complex thermal/fluid phenomena, thermal dynamics software, and integrated simulation tools. The company serves industries such as Oil and Gas, Aerospace and Defense, Automotive and Transportation, Construction, and Power Generation. The company also offers services such as data mining, process integration and design optimization.
RPG Squarefoot Solutions is an American distributor and service provider specializing in rental as well as sales of technology products for the construction industry that was established in Washington DC in 1991. The company offers wide-format scanners and printers for use with engineering mockups or architectural drawings, as well as office scanners and printers for more conventional operations. It also offers 3D laser scanning software and hardware for capturing 3D data of structures or buildings, along with equipment maintenance and reality capture services. The company chiefly serves clients in architecture, engineering, and construction as well as in infrastructure projects.
Ranking as of July 2026
Derivation Method| Rank | Company | Click Share |
|---|---|---|
| 1 | Z+F USA, Inc |
6.1%
|
| 2 | FARO Technologies, Inc |
5.6%
|
| 3 | Novanta Photonics |
5.5%
|
| 4 | Datum Tech Solutions |
4.4%
|
| 5 | Aerotech, Inc. |
4.2%
|
| 6 | Electrolift, Inc. |
4.2%
|
| 7 | Trimble Inc. |
4.2%
|
| 8 | Bentley Systems, Incorporated |
4.0%
|
| 9 | Clairex Technologies, Inc. |
3.9%
|
| 10 | CAPTURE 3D |
3.8%
|
Derivation Method
The ranking is calculated based on the click share within the laser scanner page as of July 2026. Click share is defined as the total number of clicks for all companies during the period divided by the number of clicks for each company.Number of Employees
Newly Established Company
Company with a History
*Including some distributors, etc.
*Including some distributors, etc.
| Country | Number of Companies | Share (%) |
|---|---|---|
|
United States of America
|
14 | 58.3% |
|
United Kingdom
|
2 | 8.3% |
|
Japan
|
2 | 8.3% |
|
Italy
|
1 | 4.2% |
|
Austria
|
1 | 4.2% |
|
France
|
1 | 4.2% |
|
Sweden
|
1 | 4.2% |
|
Germany
|
1 | 4.2% |
| Belarus | 1 | 4.2% |
187 products found
187 products

Tokyo Trade Techno System Co., Ltd.
650+ people viewing
Last viewed: 8 hours ago
The optimal combination of angle and distance measurement is obtained with 3D point data of unparalleled quality and reliability. The range of use ...
3 models listed

ISID-AO
620+ people viewing
Last viewed: 19 hours ago
Features of SCANTECH products ■High-precision 3D scanning possible With a maximum resolution of 0.020mm, this is the highest level industrial 3D sc...

MSJ Soken Co., Ltd.
730+ people viewing
Last viewed: 1 day ago
■Summary - Compact, lightweight, and easy to operate: L-type, 2 kg, built-in camera/laser control circuit, connects to PC with a single USB cable. ...

Reigle Japan Co., Ltd.
1700+ people viewing
Last viewed: 7 hours ago
■Features ・6mm resolution@10m30 seconds scan ・Simultaneous acquisition of laser data and RGB data ・No leveling required ・Targetless, automatic ...

APEX Co., Ltd.
520+ people viewing
Last viewed: 1 day ago
3rd generation high precision SLAM handheld laser scanner. Equipped with a long-range laser sensor and a powerful processing unit, it provides more...

Amuse One Self Co., Ltd.
680+ people viewing
◼︎TDOT series has been certified as NETIS recommended technology NETIS is a database for utilizing new technology operated by the Ministry of Land,...

Opcell Co., Ltd.
430+ people viewing
Last viewed: 7 hours ago
This is a third observation device that is neither a microscope nor a CCD camera. This is a device that takes images of large areas at high speed u...

Addin Institute Co., Ltd.
670+ people viewing
Last viewed: 20 hours ago
■Further compact and lightweight AME-OL200 is slightly smaller and lighter than the previous model. The total weight including the monopod and batt...

Terra Drone Co., Ltd.
1080+ people viewing
Last viewed: 15 hours ago
■Working time is reduced to 1/100 of the conventional time. The time required for analysis, which was the biggest challenge, was significantly redu...

Yokohama Sokki Co., Ltd.
1030+ people viewing
Last viewed: 11 hours ago
■Maximum measurement range and fastest measurement time using phase difference method ・Phase difference method maximum scan rate 1.094 milliom poi...

Hexagon AB
590+ people viewing
Last viewed: 6 hours ago
The Leica Absolute Tracker AT500 is Hexagon's first all-in-one laser tracker with a built-in battery-operated controller, making it the most portab...

Mt Precision Co., Ltd.
940+ people viewing
Last viewed: 13 seconds ago
Can measure horizontally and vertically. Achieves high precision 2D scanning at ±2mm. ■Features ・Small and lightweight, portable, convenient for ...

Artec 3D
640+ people viewing
Last viewed: 4 hours ago
■Summary ・Accuracy of 0.02 mm ・Resolution of 0.02 mm ・120FPS scanning speed ■Laser scanner that enables measurement industry-level capture at y...

Hara Seisakusho Co., Ltd.
910+ people viewing
Last viewed: 7 hours ago
The portable T-SCAN hawk 2 is the next generation lightweight 3D laser scanner. It combines the precision of an industrial measuring device with ex...

Artec 3D
490+ people viewing
Last viewed: 4 hours ago
■Summary With even greater precision, a wider field of view, and the same compactness as its predecessor, MicroII is a fully automated tabletop 3D ...

Hexagon AB
1410+ people viewing
Last viewed: 17 hours ago
The HP-L-5.8 laser scan sensor is an easy/affordable way to get started with point cloud creation. As an alternative to the HP-L-10.10, this laser ...

Apple Tree Co., Ltd.
1080+ people viewing
Last viewed: 1 day ago
The NIMBLETRACK wireless 3D scanning system has a compact design with high maneuverability and is designed to enable precise and dynamic measuremen...

TAMAYA TECHNICS INC.
880+ people viewing
Last viewed: 2 hours ago
Features ■PS250-90 ・Scanning within a maximum of 400m within a range of 90℃ from the center ・Scan rate is normal mode 30HZ, fast mode 60HZ ・IP67...

Tokyo Trade Techno System Co., Ltd.
740+ people viewing
Last viewed: 11 hours ago
The Leica RTC360 converts the surrounding situation into three -dimensional data, high -speed, easy to use and high accuracy, improving the efficie...

ISID-AO
630+ people viewing
Last viewed: 1 day ago
Features of Artec 3D products ■Less preparation for work ・Since it is portable, no tripod or equipment is required. - No need for calibration proc...

Hexagon AB
760+ people viewing
Last viewed: 2 hours ago
[Versatile, high-speed blue laser line 3D scanning. The industry's top 3D laser scanner that can handle various surface shapes and combines SHINE t...
2 models listed


ALT Co., Ltd.
690+ people viewing
■Features Scanning involves rotating a one-sided mirror using electromagnetic force to scan a laser beam. Laser marking and various laser processin...

FJDynamics
950+ people viewing
Last viewed: 45 minutes ago
■Features ・2cm accuracy ・120m range ・Real-time point cloud ・Light weight and better portability ・Indoor and outdoor scanning ・Hot-swappable d...

APEX Co., Ltd.
290+ people viewing
Last viewed: 1 day ago
Handheld laser scanner. Anyone can operate it by just walking. Real-time processing point cloud data system. Panoramic 360° rotation, indoor and ou...

Opcell Co., Ltd.
350+ people viewing
This is a third observation device that is neither a microscope nor a CCD camera. This is a device that takes images of large areas at high speed u...

Yutaka Electric Co., Ltd.
330+ people viewing
Wide reading area and excellent environmental resistance. Environmentally resistant industrial barcode reader with a proven track record worldwide ...
6 models listed

ISID-AO
1050+ people viewing
Features of Artec 3D products ■Less preparation for work ・Since it is portable, no tripod or equipment is required. - No need for calibration proc...

Opcell Co., Ltd.
500+ people viewing
It is possible to detect defects inside glass, transparent ceramics, sapphire, quartz, etc. A laser sheet is projected onto the object, and a camer...
Hexagon AB
880+ people viewing
Last viewed: 14 hours ago
The first direct-scan laser tracker bridges the gap between point-by-point measurements and advanced laser scanning at a scale previously only poss...

Artec 3D
450+ people viewing
Overview ■Speed Capture the entire dome in 1.7 minutes at the highest resolution. ■Accuracy You can expect reliable 3D accuracy of 1.9mm from 10m ...