All Categories
History
This section provides an overview for scara robots as well as their applications and principles. Also, please take a look at the list of 19 scara robot manufacturers and their company rankings. Here are the top-ranked scara robot companies as of July, 2026: 1.EKE, 2.Absolute Robot Inc., 3.Stäubli International AG..
Table of Contents
Categories Related to SCARA Robots
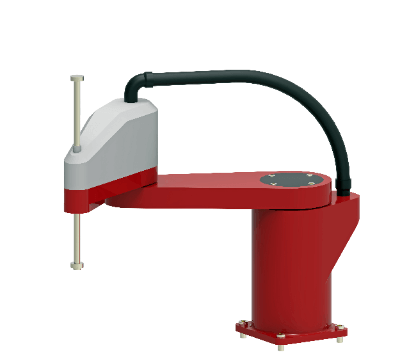
A SCARA robot is a horizontally articulated industrial robot with three rotational axes for horizontal motion and one axis for vertical motion.
The acronym SCARA stands for "Selective Compliance Assembly Robot Arm," and the robots are commonly referred to as SCARA robots. SCARA robots have the following features.
Taking advantage of these features, the SCARA robot is used for assembling work applications such as inserting and placing parts and tightening screws, contributing to the automation of production sites.
SCARA robots are often used in production lines for food products and electronic substrates. In addition to these applications, there are various other uses such as pick & place operations for parts, etc., press fitting operations, dispensing operations, assembly operations, etc.
SCARA robots are composed of four axes of motion: three axes of rotation and one axis of vertical motion. 3 axes of rotation are all used to move the arm tip horizontally. From this configuration, SCARA robots can be said to be specialized for horizontal movements.
The three rotary axes are used to move the tip of the robot horizontally to a position directly above the workpiece at high speed, and then the vertical axes are used to approach the workpiece from above. Then, the tip of the robot approaches the workpiece from above using the vertical axis and performs tasks such as gripping the workpiece.
The SCARA robot's arm tip can be equipped with the following tools depending on the work to be performed.
Teaching is required to operate SCARA robots. Until now, a dedicated tool called a teaching pendant was generally used. In recent years, there has been an increasing number of SCARA robots that emphasize ease of use, such as models that can be taught on a PC and models that can be taught easily even by beginners, called direct teaching.
Some SCARA robots are designed for high-speed operation. The SCARA robots contribute to the productivity improvement of the entire production line by operating at high speed.
If SCARA robots can finish their work quickly, workpieces can be passed on to subsequent processes more quickly. As a result, the time to produce a single product is reduced. This is the reason why the productivity of the entire line improves when SCARA robots operate at high speeds.
The following measures are effective in realizing SCARA robots' capability of high-speed operation.
By transmitting information obtained from the camera to the SCARA robots, the performance of the robot itself can be improved. Consider the case where SCARA robots are tightening screws to a workpiece. Each workpiece has individual intersections, and strictly speaking, each has a slightly different size.
Therefore, even if the SCARA robots holding the screw move to the teaching position, a situation can arise where the screw hole on the workpiece does not match the position of the screw tip on the end of the SCARA robots. In such a situation, screw tightening fails in many cases.
Here, a camera is used to photograph the screw holes and calculate the amount of displacement from the reference position. The amount of misalignment is then sent to the SCARA robots, which corrects the position by offsetting it to the original teaching point.
This enables the SCARA robots to perform screw-tightening work no matter where the screw hole is located within the camera's imaging range. This mechanism is called "image position compensation" and is widely used in factory automation.
*Including some distributors, etc.
Sort by Features
Sort by Area
Absolute Robot Inc., established in 2013 and based in Worcester, Massachusetts, United States is a manufacturer specializing in complete automation solutions for injection molding machines. The company provides a comprehensive product portfolio that includes full servo robots, and pneumatic sprue pickers, and holds the distinction of being a FANUC-authorized system integrator. Beyond manufacturing, it also offers valuable services such as application design and testing, robust aftermarket support, as well as in-person training sessions both before and after the delivery of robots. These automation solutions find applications in diverse industries, including industrial automation, automotive manufacturing, and the broader field of robotics.
Stäubli began in Horgen, Switzerland in 1892. Stäubli designs, produces, distributes, and provides support for products for numerous industries including aerospace, alternative fuels, medical devices, packaging, photovoltaics, and semiconductors. Stäubli has 4 primary product lines including electrical connectors, fluid connectors, robotics, and textile. Electrical connector products include cable couplers, modular connectors, and test and measurement connectors. Fluid connectors include mold clamping systems, quick and dry disconnect couplings, and safety breakaway couplings. Robotics include industrial robots, collaborative robots, and mobile robots. Textile includes weaving preparation and frame weaving.

Conzorio Macchine Utensili (Comau), established in 1970, is a manufacturer in Grugliasco, Italy, specializing in the production of industry 4.0-enabled systems, products, and services. The company offers joining, assembly, and machining solutions for traditional and electric vehicles, and robotized manufacturing systems, including collaborative and wearable robots. The offering also extends to project management and consultancy, IoT services, and maintenance and training for vehicle manufacturing, heavy industry, railway, renewable energy, and various general industries. The company owns its international network in 13 countries.
Motion Control Products Ltd., established in 1994 and based in the United Kingdom, is a manufacturer of advanced motion control and automation products. The company produces products such as actuators, drives, motors, multi-axis controllers, and mechanical components and supplies them to the original equipment manufacturers' applications. With the ISO 9001: 2015 accreditation, the company maintains quality in every product manufactured at its manufacturing facility. The company operates in different locations in the USA, Hong Kong, and Mainland China.
Shanghai Yixin International Trade Co., Ltd was founded in 1995 and is located in Jiading District, Shanghai is a manufacturer of electric drive and motion control. The company offers an extensive product catalog, including the K1 pulse servo drive, ME800 MV industrial drive, and SCARA robot AR series. These products find applications in knitting woolen sweaters, variable torque loads such as fans and pumps in sugar mills, and plastic drop molding machinery.
Estic Global provides serves manufacturing and automotive industries as well as providing CAD-related machinery across industries. Specialized equipment and tools include assembly tools, automated machinery, robotics, and smart arm tools. Estic Global's tools assist in error detection and prevention, safety, down-time prevention, productivity assistance, and traceability. As per its namesake, Estic Global, founded in Osaka, has a global sales and repair network.
Skilled Group was established in 1973 in Schio, Italy, and is a manufacturer of industrial automation products. The company's products include conveyors, robot palletizers and automated guided vehicles that are used in food, beverage, consumer goods and pharmaceutical industries for automation. It also offers certified training to customers on how to use the products. The company has other offices in the USA and Europe. It is ISO 9001 certified and has other accreditations from different countries, like CSA in Canada and UL in Germany.
DENSO WAVE INCORPORATED was established in 1976 in Aichi, Japan provides industrial solutions through its manufacturing technology by developing and producing automatic identification equipment, industrial robots, controllers, and system solutions. The company is known for creating QR codes and cloud services, which are registered trademarks of DENSO WAVE Inc. These codes and services are used for anti-forgery measures and in business cards or catalogs. Their AUTO-ID products include terminals, scanners, RFIDs, and software that enables various operations. These products are supported by customized system solutions such as QR code solutions and IoT solutions (Internet of Things).
Initially established in 1938, Shibaura Machine has three-quarters of a century providing Comprehensive technology and supporting the “monozukuri” of the world. With the technical and development capabilities of the Shibaura Machine Group, various machines and services create rich value and contribute to the creation of an industrial base. Working on the eight technical platforms, they develop and manufacture a wide range of production devices that meet the needs of the times, delivering the best solutions by combining our accumulated excellent know-how and the latest technology. Shibaura Machine uses its knowledge of modern global standards of advanced technology to support Japan and the world.
Janome was founded in 1984 and headquartered in Japan is a manufacturer of sewing machine motors and other precision parts. The company offers an extensive and diversified product portfolio including, servo presses, Cartesian robots, SCARA robots, automatic screw presenters, and computer robots. These products are integral to various industries, particularly textile and apparel manufacturing; and are used for press fitting, powder compression and shaping, perforation cutting, press molding, and caulking, among other essential applications.
FANUC Corporation, established in 1972 and headquartered in Yamanashi Prefecture, Japan, is a manufacturer of factory automation, robomachine, IoT, and robotics. The company offers an extensive and diversified product portfolio including, servomotor, robodrill small cutting machine, roboshot electric injection molding machine, robocut wire electrical discharge machine, and lasers. These cutting-edge products cater to a wide range of industries, spanning from automotive, health care, and aerospace to electronics. The aim of the company is to provide efficient and low-cost products to customers.
KUKA AG was founded in 1898 in Augsburg, Germany. The company is a subsidiary of GD Midea Holding Co., Ltd. and is an automation developer, designing and manufacturing robot-based automation solutions for medical, automotive, warehousing, and distribution industries. The company’s product segments include robot systems, production machines, and systems, mobility as a driver of Industry 4.0, and process technologies that provide special welding processes to factories. The company’s services include repair and servicing for robots and machines and engineering services for designing and programming robotic systems.
Omron Corporation, started in 1933 and headquartered in Kyoto, Japan, is a manufacturer of automation components, equipment, and systems, and it developed the first contactless proximity switch in 1960. It has four domains, including industrial automation, electronic components, healthcare, and social systems, and it provides products and services in around 120 countries and regions. Some of its products include microsensing devices, access control systems, industrial robots, surveillance cameras, and blood pressure monitors. In 1971, it developed the first online cash machine, and in 1972, it established Japan’s first welfare factory.
EKE is a manufacturer and supplier of industrial robots headquartered in Shanghai, China. The company was founded in 2012 and is a subsidiary of Robot Pheonix. The company offers a diverse range of products that span industrial robots, collaborative robots, robotic arms, and mobile robots. Its offerings are designed to enhance productivity, efficiency, and precision in industries such as manufacturing, logistics, healthcare, and more. Additionally, the company offers services including product management, installation & debugging, training, repair & maintenance.
Hirata Corporation is a manufacturer and distributor of industrial robotic and logistics equipment based in Kumamoto, Japan. Established in 1951, the company first dabbled in manufacturing and marketing industrial vehicles. In 1958, they turned to manufacturing agricultural-related products. By 1959, they started their first conveyor belt line, and in May 1964, their television assembly line was launched. In 1977, they developed their first robot-controlled machine, and from there, they shifted towards robotic logistical equipment. The company is present in eight countries, namely Japan, Taiwan, the United States, Mexico, China, Singapore, Malaysia, and Thailand.
Mitsubishi Electric Corporation (Mitsubishi EC) is a Japanese multinational manufacturer of electrical as well as electronic products and systems originally established in 1921 by Mitsubishi Shipbuilding Co., now known as Mitsubishi Heavy Industries, Ltd. Based in Tokyo, Japan, the company produces home appliances, HVAC products, and automotive equipment, as well as factory automation and communication systems. These supply consumers and clients internationally throughout the residential, commercial, and industrial sectors. Mitsubishi EC has several subsidiaries operating globally; some as distributors of its products. Some of its notable subsidiaries are Mitsubishi Electric Power Products, Inc. and Mitsubishi Electric Automation, Inc.
Yamaha Motor Co. Ltd., founded in 1955 and based in Iwata, Japan, is a manufacturer and distributor of motorized products. Its product range includes several lines of motorcycles, scooters, and motorized bicycles. Its motorcycles feature an electronic control system for stabilization and a responsive braking system for safety. The company also offers, recreational off-highway vehicles, outboards, and snowmobiles. The company has received several accolades such as the Red Dot Design Award for 12 consecutive years and operates the Yamaha Technical Academy for technician certification.
Delta Electronics was founded in 1971 in Taipei, Taiwan. Delta Electronics is a global provider of power and thermal management solutions, serving power electronics, automation, and infrastructure. Delta’s power electronics division sells components such as inductors, power and system components such as industrial power supplies and external adapters, fans and thermal management such as DC brushless fans and motors, and automotive electronics. Automation includes industrial automation and building automation subdivisions. Infrastructure includes ICT infrastructure, energy infrastructure & industrial solutions, and display & visualization. Delta Electronics also provides solutions for data center, telecom energy, and EV charging.
TM Robotics is an American authorized distributor of industrial robots manufactured by the Japanese company Shibaura Machine (formerly known as Toshiba Machine) that was established in the year 2000. Based in Elk Grove Village, Illinois, the company offers various industrial robots, including Selective Compliance Articulated Robot Arm (SCARA), Cartesian, and 6-axis model category robots. These are used in a wide range of industrial facility applications, including loading or unloading, machine tending, and assembling. TM Robotics operates internationally, with a European headquarters in Hertfordshire, United Kingdom and a network of distributors across North and South America, Africa, Asia, and Europe.
Ranking as of July 2026
Derivation Method| Rank | Company | Click Share |
|---|---|---|
| 1 | EKE |
13.8%
|
| 2 | Absolute Robot Inc. |
9.9%
|
| 3 | Stäubli International AG. |
8.3%
|
| 4 | Comau |
6.2%
|
| 5 | Motion Control Products Ltd. |
5.7%
|
| 6 | Yamaha Motor Co., Ltd. |
5.4%
|
| 7 | Shanghai Yixin International Trade Co., Ltd |
5.1%
|
| 8 | Gridbots Technologies Private Limited |
5.1%
|
| 9 | Skilled Group |
4.7%
|
| 10 | TM Robotics |
4.7%
|
Derivation Method
The ranking is calculated based on the click share within the scara robot page as of July 2026. Click share is defined as the total number of clicks for all companies during the period divided by the number of clicks for each company.Number of Employees
Newly Established Company
Company with a History
*Including some distributors, etc.
*Including some distributors, etc.
| Country | Number of Companies | Share (%) |
|---|---|---|
|
Japan
|
8 | 53.3% |
|
Italy
|
2 | 13.3% |
|
United States of America
|
1 | 6.7% |
|
Switzerland
|
1 | 6.7% |
|
United Kingdom
|
1 | 6.7% |
|
China
|
1 | 6.7% |
|
Taiwan
|
1 | 6.7% |
25 products found
25 products

Oriental Motor Co., Ltd.
1120+ people viewing
Last viewed: 1 day ago
■Summary ・Lightweight and thin with a mass of 7.6 kg and a height of 140 mm ・Able to approach narrow spaces ・The third arm can be freely designe...

Tatsuta Co., Ltd.
11640+ people viewing
Last viewed: 6 hours ago
■Improved motor rotation speed, reducing cycle time by 25% ・The joint speed of the 6th axis has been increased from 225°/sec to 450°/sec. ・Cycle ...

IAI Co., Ltd.
560+ people viewing
■Features of power con SCARA robot equipped with battery-less absolute encoder & pulse motor ・Compact SCARA robot with pulse motor and low price ...

IAI Co., Ltd.
680+ people viewing
Last viewed: 4 hours ago
■Features of power con SCARA robot equipped with battery-less absolute encoder & pulse motor ・Compact SCARA robot with pulse motor and low price ...
Baro Electric Industry Co., Ltd.
510+ people viewing
They are generally specialized for linear movement and are suitable for palletizing products of specific shapes and sizes.

KUKA AG
630+ people viewing
Last viewed: 1 day ago
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
700+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
690+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
750+ people viewing
Last viewed: 23 hours ago
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
870+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
860+ people viewing
Last viewed: 14 hours ago
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
980+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
790+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
750+ people viewing
Last viewed: 13 hours ago
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
1040+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...

KUKA AG
770+ people viewing
Powerful, quick, high efficiency. The super -compact new KR SCARA robot provides the maximum efficiency and economics of small components, material...